广州高新兴机器人有限公司
摘要:现代化农业发展理念下,相关农业研究人员积极推广农业移动机器人的应用,进而提高农业生产效率、降低人工劳动强度,基于果蔬采摘机器人、杂草控制机器人的应用,大大推动了现代农业向智能化、自动化、机械化方向发展。基于此,本文就农业机器人类型进行阐述,分析伺服阀驱动控制电路设计。
关键词:四驱农业;移动平台;运动控制;伺服驱动
引言:四驱农业机器人设计过程中,移动平台是其中重要的组成部分,该移动平台可实现多种作物在同一平台上开展作业活动,在相关研究人员的共同努力下,积极探索对农田环境适应能力较强的农业机器人平台,确保在系统设计和伺服驱动上加以专研,进而提升农业机器人使用性能。
一、农业机器人平台类型
(一)轮式农业机器人
相关设计人员在设计农业机器人过程中,充分考虑机器人移动平台是否满足田间地势地形、土质等因素的行走条件,就轮式农业机器人来说,机械人行走灵活、转向方式多样化、质量轻,因此在现代农业发展中,轮式农业机器人应用范围较广。轮式农业机器人设计原理,是结合农业实际耕作需要进行设计,主要的结构包括前轮、后轮、蟹形转向等,确保更好控制农业机器人的行走[1]。将轮式农业机器人实际应用在农业生产中,主要通过前轮转向和四轮转向配合使用的原理前进和行走,基于轮式机器人原地旋转与蟹形转向相反,因此机械人在实际运作过程中可实现零半径转向,进而提升轮式机器人运作性能。
履带式农业机器人
履带式农业机器人分为不同的类型,整体结构设计上相对复杂。履带式农业机器人整体性能优势显著,负重能力强,与地面接触面积较大,可应用于泥泞的土壤中,有效解决田垄障碍物问题。鉴于履带式农业机器人类型多样化,在农田作业中具体应用哪种方式,需要结合实际耕作情况。
腿式农业机器人
腿式农业机器人较比其他类型的机器人,原作原理上存在一定的差异性,主要的运动轨迹是由离散的点组成,具体应用在农业耕作中,作业能力强、对农田破坏性小。相关研究人员在实际研究中发现,腿式农业机器人存在负重能力较小的缺陷,因此,农业专家人士在实际推广农业机器人过程中,更加倾向于轮腿、履腿等复合式的机器人,进而有效解决负重能力较小的难题,从根本上发挥出农业机器人在控制方面的优势作用,确保机器人在实际的农田作业中适用于多类型的地形。
复合式农业机器人
当前农业领域中,应用范围广泛的农业机械人是复合式农业机器人。复合式农业机器人,集成了多类型农业机器人的优势特点,有效规避在农田行走中的一些弊端,在结构设计方面,主要运用了跨越障碍的控制方法,耕作效率高,能够适用于复杂的地势环境中,农业耕作效果明显,将大量的劳动力解放出来。复合式农业机器人,结合了腿式、履式等机器人等,可在农业耕作的不同环境中,自由切换控制模式,确保复合式机器人行走的灵活性。
全数字式电液伺服阀驱动控制电路设计分析
交流伺服驱动系统上位机软件设计
基于现代化电子技术快速发展,相关设计人员将更多科技设计元素运用在农业机器人移动平台系统设计中,进而在现代电子科技技术衍生下,伺服驱动系统智能化程度更高。伺服驱动系统智能化应用优势,主要体现在支持人机交互,相关用户可以不受限对系统参数进行修改,实时监控移动平台的动态化变化状态[2]。交流伺服驱动单元可靠性高,整体性能好。交流伺服驱动系统上位机软件单元中,利用Modbus协议,构建了结构完整的伺服驱动上位机监控系统。
相关设计人员基于伺服驱动系统控制功能角度,确保上位机软件开发可通过系统显示界面实时反映各项参数信息,便于用户进行参数设置。基于交流伺服驱动系统上位机软控制功能而言,用户具体设计参数时,利用上位机可顺利进入交流伺服驱动系统的主界面中,通过对相关参数的设计,有效发挥交流伺服驱动系统控制功能。相关研究人员,通过分析农业机器人移动平台系统中的伺服驱动系统,发现通过伺服驱动系统的应用,有效对农业机器人进行灵活控制,大大提升了机器人的工作效率,实际应用效果显著,同时,为相关研究人员提供重要的理论依据。
(二)伺服阀驱动控制电路硬件设计方案
伺服驱动系统中,主要以驱动控制电路为应用载体,具体的工作原理是由驱动控制电路进行电流输出,进而驱动伺服阀进行工作,有效控制了液压油流动方向,在全过程驱动控制中,驱动控制电路中的电位器会实时将驱动信号传输到伺服驱动系统单元中。伺服驱动控制电路中运用的是控制芯片,利用总线电路接收数字信号指令,确保信号经过驱动电流为伺服阀提供运作所需的电力。驱动控制电路对接收到的信号指令进行信息反馈,实现对各个工作电路集中控制的目的,伺服驱动系统中的电源电路通过增加波滤模块和电容波滤网络,进而有效改善驱动控制电路的兼容性能,确保最终实现对驱动控制电路的电源供给。
(三)伺服阀伺服驱动系统控制电路软件设计
驱动系统中的伺服阀伺服控制电路软件设计,通过对驱动系统进行初始化设计,设定相关的参数,在通信接口支持下,实现对数据格式的转换,并对波滤后的信息数据进行分析,进而提升控制参数的控制量,保证驱动电路有效输出驱动电流。相关研究人员通过实际试验分析,全面分析了伺服驱动系统驱动控制电路在伺服驱动系统中的应用优势,通过不同信号输送,发现驱动控制电路可有效满足伺服驱动系统使用需求。驱动系统结构设计(如图1所示)。
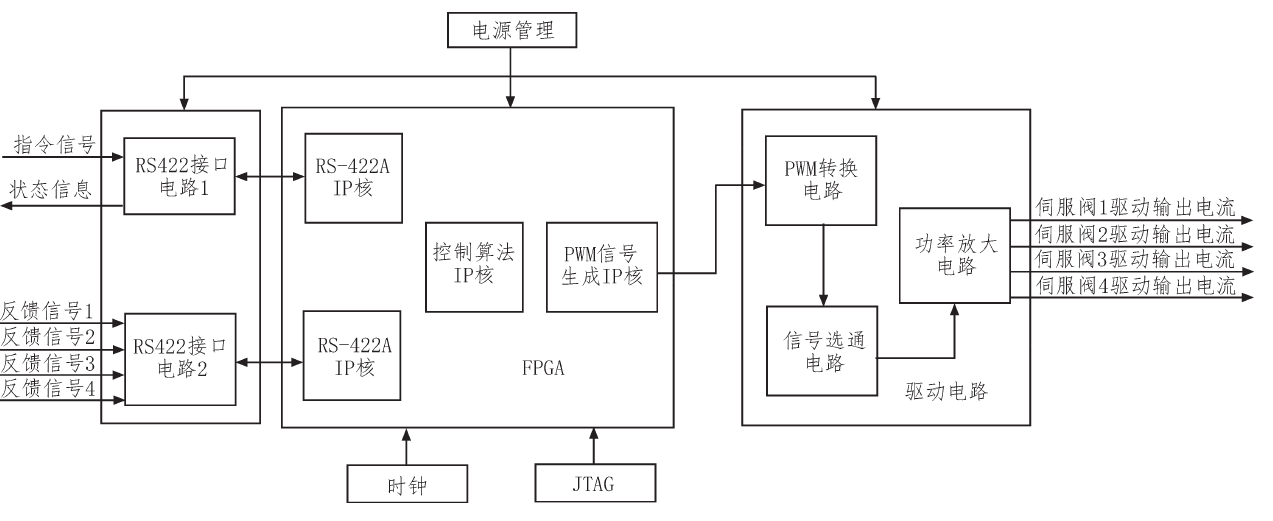
图 1 驱动系统结构设计
关于四驱农业机器人移动平台协调运动控制分析
车轮转向角分析
农业机器人的研发应用,为现代农业发展提供了动力支持,基于农作物种植户角度来看,四驱农业机器人设计需要提升机器人移动平台设计的经济性、可操作性,确保从根本上满足农户耕作需要。设计人员在具体设计机器人车轮转角时,确定了转向机齿轮转向角和转向机齿条之间的位移关系,仔细确认齿条位移与车轮转角之间的关联性。
协调运动的控制方法
在轮式机器人车轮转向设计过程中,涉及到“阿克曼转向”原理,通过阿克曼转向调控,保证机器人车轮处于良好的运动状态下,防止打滑现象的出现。部分研究人员,通过将“转向前束角”理念引入到协调运动策略控制中,进而实现对车轮机器人车轮打滑现象的判断,进而更好判断机器人车轮运转方向。
结论:综上所述,新时代发展下,现代农业智能化装备和机械化程度不断提高,农业发展向着现代化、机械化、智能化方向发展。相关设计人员,不断探寻四驱农业机器人移动平台系统中机械结构的组成,加强对伺服驱动系统的研究分析,确保为农业机械人设计研发提供相关的支持依据。
参考文献:
[1]田阳杰,易亚军,秦龙.基于Modbus协议的伺服驱动系统上位机软件设计[J].机电工程技术,2020,49(06):116-117+173.
[2]蒙臻,倪敬,周晶.工业机器人伺服系统服役性能综合性实验设计[J].实验技术与管理,2020,37(06):48-52.
[3]倪敬,任旭,毋少峰.工业机器人线缆服役可靠性加速实验系统[J].实验室研究与探索,2020,39(04):54-58.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



