季江华 贾骐源 李峰 蔡文飞
(1.中国航发湖南动力机械研究所,湖南 株洲 412002;
2.陕西航空电气有限责任公司,陕西,西安 710068)
关键词:航空 无刷 三级式 励磁 主发电机 控制策略
20XX年第X期 1
1引言
近年来,随着电力电子器件、多相电机、电机控制策略日趋成熟,航空无刷式电起动系统得到了跨越式发展。由于28VDC的电源具有可靠性高、适用性广、匹配性强等特点,依然是现阶段飞机机载电源的重要构型。一种与28VDC电源体制匹配的低压三级式双三相电励磁起动发电系统获得了成功应用。这种低压无刷起动系统起动力矩可控,冲击电流小,具备故障检测与隔离能力,能够实现装机后免维护及优良的电源特性。
三级式双三相电励磁式电机是一种非线性、强耦合的系统。不仅存在定子、转子之间的耦合,还存在定子绕组间的交叉耦合[1]。系统的转矩方程中包含状态变量之间的乘积项,这些系统复杂性与高度耦合性都给电机控制带来很大困难,本文介绍了一种具有工程应用价值的解耦控制方法,能够解决系统的强耦合问题,减少扰动,并实现预期的转矩输出特性。
2系统架构
2.1三级式双三相电励磁电机结构
双三相三级式电励磁电机主要由主发电机、励磁机、永磁机、旋转整流器、空心轴、弹性轴、壳体、端盖组件等组成,电机与发动机之间采用快卸式卡箍组件连接,整体结构如图1所示。

图1三级式双三相电机结构
2.2主功率控制架构
主功率部分由两套主发定子绕组三相全桥变换器及其驱动电路、一套励磁绕组H桥逆变器及其驱动电路、DC/DC升压电源、支撑电容和电流传感器、继电器等部分组成。控制器的控制印制电路板组件以数字信号处理器(DSP)为核心,实现系统数据运算处理、控制、保护、故障隔离、状态信号采集、通讯等功能。

图2系统功率部分架构
3、三级式双三相电励磁建模方法
3.1 主电机建模
双三相电励磁同步电机定子侧存在着ABC-UVW两个三相绕组[2],转子侧励磁由励磁控制模块给出独立的直流励磁电流,在ABC-UVW坐标系的电磁关系基础上建立起同步电机静止坐标系下的磁链方程如下所示:
![]()
式中,
![]() ;
;
![]()
双三相电励磁同步电机在ABC-UVW双绕组静止坐标系下的电压方程为:
![]()
式中,
![]() ;
;
![]() ;
;
电阻参数矩阵中,![]() 为定子绕组电阻,
为定子绕组电阻,![]() 为励磁绕组电阻。
为励磁绕组电阻。
对同步电机进行数学建模以及运行状态分析时,必须对其内部电磁关系进行解耦,实现一个从静止坐标系向旋转坐标系的变换。到经过坐标变换的双三相电励磁同步电机的电压方程为:

式中,
![]() ——同步电机电角速度,单位为rad/s ;
——同步电机电角速度,单位为rad/s ;![]() ——转子侧励磁绕组电压,单位为 V;
——转子侧励磁绕组电压,单位为 V;![]() ——转子侧励磁绕组电流,单位为 A;
——转子侧励磁绕组电流,单位为 A;![]() ——双三相定子电压dq0 轴分量,单位为V;
——双三相定子电压dq0 轴分量,单位为V;![]() —双三相定子电流dq0轴分量,单位为A;
—双三相定子电流dq0轴分量,单位为A;![]() ——同步电机磁链;
——同步电机磁链;
进一步可以得到双三相电励磁同步电机在旋转坐标系下的磁链方程为:

式中:
![]() ——同步电机dq轴同步电感,单位为H;
——同步电机dq轴同步电感,单位为H;![]() ——同步电机dq轴等效互感,单位为H;
——同步电机dq轴等效互感,单位为H;![]() ——同步电机内部互感,单位H;
——同步电机内部互感,单位H;![]() ——转子侧的励磁绕组电感,单位为H。
——转子侧的励磁绕组电感,单位为H。
3.2 励磁机建模
在发动机起动的各个阶段,需要起动系统提供满足发动机扭矩-转速特性的起动扭矩,励磁机中采用单相交流电励磁的方法,能够实现在静止状态下的励磁机空间内产生交变磁场,使得励磁机的三相转子绕组中生成感应电势,该感应电势经转子上的旋转整流器整流后,实现主发电机的转子励磁。
当电机的机械转速为n时,在励磁机空间内,三相转子绕组中产生的感应磁势的磁链方程为:

δ——开始转动时励磁机转子A相绕组轴线超前励磁绕组轴线的电角度;
Mf—— 励磁机的励磁绕组与电枢绕组之间的互感系数;
ω——励磁机电角速度,![]() 。
。
对上式求导,可得电枢绕组中产生的感应电势eA、eB、eC为:

根据上式可可看出,转子励磁电流主要由三个因素决定,励磁机的励磁电压Uf、励磁频率和电机的旋转角速度ω。在励磁条件恒定的情况下,随着电机转速的升高,主发电机的转子励磁电流也将随之增大。
3.3 电机扭矩方程
双三相电励磁同步电机的电磁转矩方程为:
![]()
4解耦控制策略
根据第三章的系统建模方程组可知,三级式双三相电励磁式电机是一种非线性、强耦合的系统。针对发动机起动过程转速扰动小,对转矩要求高等特点,以传统的转速-电流闭环控制为基础,改进成为扭矩-电流闭环矢量控制策略,控制策略框图如图3所示,控制采集两套绕组相电流经计算得旋转坐标系电流id1、id2和iq1、iq2,分别与经过转矩计算后给定q轴电流和给定d轴电流作差,经PI调节后输出dq轴电压大小和电角度;经反Park变换得到静止坐标系下对应电压大小,再经过脉宽计算分别得出控制三相全桥逆变器1和三相全桥逆变器2的各桥臂开通和关断时间,分别控制三相全桥逆变器1和三相全桥逆变器2的各桥臂开关状态,实现系统的带载起动。

图3控制结构图
基于双d-q坐标变换时,将其看成两个三相子系统的组合,然后对每一个子系统分别采用传统的三相电机坐标变换进行控制,具体控制框图如图4所示,它包括4个电流环PI调节器
[3]。这种控制方式完全可以等效成对两台三相PMSM的控制,两套系统均采用了id=0的控制策略。
两套绕组的q轴电流给定值相等,均为转速环PI调节器的输出。当id1=id2=0时,由电磁转矩的表达式可知,只要保持iq的值不变,电机输出的电磁转矩就不会发生变化。由于iq1= iq2可以保证两套绕组的输出电流为正弦且幅值相等,进而可以保证两套绕组的输出功率也一致,因而这是一种最优的电流分配方案。三级式双三相电励磁式电机基于simulink的系统仿真模型见图2[4]。

图4基于双dq坐标轴的解耦控制模型
5仿真及实验
5.1仿真计算
基于本文所提出控制策略,在恒转矩阶段,给定恒定交轴电流,在恒功率阶段,依据恒功率曲线设计电流给定值,给定曲线如图5所示。

图5给定电流及电机输出电磁转矩曲线
上图中,在给定电流条件下,采用上文中提出的双三相电机全解耦控制技术条件下,仅通过调节主发电机交、直轴电流,电机输出电磁转矩曲线在趋势上与给定电流完全一致,验证了解耦控制方法的可行性。在起动过程中主发电机励磁磁路高度饱和,气隙磁场随转速不发生变化,而两套绕组输出电磁转矩与主发电机电枢回路交轴电流完全呈正比,起动过程中主发电机电流见图6。

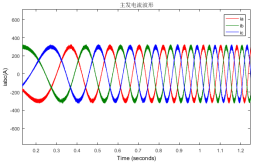
图6一套绕组电流波形
采用双三相电机全解耦控制策略下,主发电流曲线在峰值上跟随给定电流,第二套绕组电流波形如图7所示。


图7二套绕组电流波形
对比可发现,在相同电流给定值条件下,两套绕组电流输出一致,在保证转矩解耦控制的前提下,实现了双三相均流控制,避免了电流不均衡导致的电机发热不均匀问题。
5.2原理样机试验
对原理样机开展试验,首先采用分别采用单套绕组进行起动试验,电机轴端施加恒定负载,分别控制一套和二套绕组进行起动试验,试验结果如图8所示。


图8两套绕组分别起动试验
根据单套绕组的起动试验结果,在控制单套绕组起动试验时,两套绕组输出电流一致,PI调节效果也较好,双绕组电流均衡,均跟随给定值300A。
双绕组起动试验波形中,采用解耦控制方法,得到试验结果见图9,双三相电机双三相主发电流正弦度良好,励磁电流波形符合单相励磁波头偏转的电枢反应理论。

图9双绕组起动试验
因此,通过单套绕组及双绕组同时起动试验的结果,表明在三级式双三相电励磁中,采用基于双dq轴的id=0的控制技术,能够实现电机解耦目标,并实现良好的起动性能。
6总结
对于非线性、强耦合的三级式双三相电励磁式电机,对主发电机的两套绕组分别进行d-q轴变换,采用双绕组id=0的控制策略,能够实现较好的控制效果,同时降低了对硬件电路的计算资源需求,通过仿真计算及原理样机试验,系统的输出特性稳定,谐波含量低,抑制了系统发热、转矩脉动大的现象,具有良好的工程应用价值。
参考文献
[1] 谢芳,郑剑. 双三相感应电动机SVPWM系统的研究 [J].驱动控制,2010,4:66-69.
[2] 张岳,沈建新.双三相感应电动机矢量控制调速系统建模与仿真[J].微特电机,2014,42(7):61-65.
[3]王六平.PID控制系统设计[M].北京:清华大学出版社,2023.
[4] 韦榕许镇琳王秀芝.电气传动系统仿真的新工具--MATLAB5.2电气系统模块库[J].电气传动,2000(1):57-59.
姓名:季江华 性别:男 民族:汉
出生年月:1986.03 籍贯:江苏南通
单位:中国航发湖南动力机械研究所
专业:飞行器动力工程 研究方向:发动机系统
学历:工程硕士 职称:高级工程师

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



