天津工业大学电子与信息工程学院,天津300387
摘要
本基于超声波声弹效应的超声波螺旋紧固应力检测原理,研发出一款基于超声波的回波采集系统及计算一体化螺栓预紧力测量系统。该系统将攻克如何精准地在工程机械工作过程中检测螺栓预紧力的技术难题。研究内容主要包括建立超声波螺栓紧固应力检测系统的整体方案,基于相关性算法的超声波声时差计算及改进和超声波螺栓紧固应力检测系统的硬件设计三个主要部分。定量标定实验获取了螺栓线膨胀系数对应关系、超声波温度补偿系数和超声波温度灵敏度系数。通过连续测量方式,在螺栓预紧过程中实时监控螺栓轴向应力变化情况,该设备的应力分辨率为0.36MPa,完全满足现阶段螺栓紧固应力测量要求。
关键词:螺栓 超声波 声弹效应 预紧力
一、引言
螺栓紧固件作为通用连接器,其广泛用于航空航天、电力系统、机械制造、交通运输、化工生产等领域。螺栓连接是工程机械主要的装配方案,其最根本的目的是在被连接件之间产生可靠的夹紧力,即螺栓的预紧力[1]。选取合适的螺栓预紧力范围,采取有效的手段控制并监测高强螺栓的预紧力,对于确保高强螺栓的使用安全,保证紧固工艺稳定合理、受力情况精准可控具有重要的工程意义。
工程中经常用到的螺栓预紧力检测方法有测量螺栓伸长量法、测定螺母旋转角法、扭矩扳手法[2]、电阻应变片法、光弹性法[3]、磁测法以及超声导波法[4]等。基于超声波的检测方法作为一种无损检测方法,具有传播距离远、能量衰减弱、灵敏度高等优点。超声波测量法建立的是螺栓轴向应力与超声波声时的关系,测量的是超声波传播时间,螺栓拧紧扭矩的大小和与工件接触面的状态无关[5],因此可以消除传统方法中摩擦力等因素的影响。此外,超声波测量法可以测量已紧固螺栓的应力大小,通过事先标定出超声传播时间与螺栓轴向应力的关系,能够对在役螺栓的应力进行实时测量。
二、方法
2.1测量装置结构设计
采用压电换能器与螺栓直接粘合的方式来制备内嵌传感器的螺栓,使其成为一个整体,在装配和测量过程中更加方便,其装配测量结构如图2-1所示。

图 2-1 装配测量结构
2.2建立超声波测力模型
使用超声波纵波声速测量法测量螺栓紧固应力时,超声波传感器探头通过磁吸方式,贴合到螺丝头端面,可以传输和接收压电陶瓷换能器的压电信号。设螺栓受轴向应力产生均匀弹性形变,根据 Hooke 定律,超声波以超声波纵波形式在螺栓中传播的速度为
![]() (2-1)
(2-1)
基于 Takahashi 和 Motegi提出的![]() 简化方程可知
简化方程可知
![]() (2-3)
(2-3)
令![]() ,有
,有
![]() (2-4)
(2-4)
上式表示,被测件材料特性K为沿轴向方向的声弹系数,![]() 为无应力条件约为 5920m/s。
为无应力条件约为 5920m/s。
![]() 是在应力条件
是在应力条件![]() 下的超声波纵波传播速度。
下的超声波纵波传播速度。
在标准温度![]() 摄氏度的作用下,螺栓的标准长度为
摄氏度的作用下,螺栓的标准长度为![]() ,螺栓在温度变化
,螺栓在温度变化![]() 时的螺栓长度L(0,T)的表达式为
时的螺栓长度L(0,T)的表达式为
![]() (2-5)
(2-5)
式中β为热膨胀系数,对于低碳素钢而言,其热膨胀系数约为![]() 。对于螺栓本身而言,其不仅受热膨胀对螺栓的影响,还要考虑力对螺栓长度产生的影响,根据式(2-6)可知,螺栓的长度
。对于螺栓本身而言,其不仅受热膨胀对螺栓的影响,还要考虑力对螺栓长度产生的影响,根据式(2-6)可知,螺栓的长度![]() 的可表示为
的可表示为
![]() (2-6)
(2-6)
设在无应力、标准温度![]() 摄氏度条件下,螺栓的长度为
摄氏度条件下,螺栓的长度为![]() ,则超声波在螺栓中的飞行时间可表示为
,则超声波在螺栓中的飞行时间可表示为
![]() (2-7)
(2-7)
通过化简,可知超声波声速的温度补偿系数α为
![]() (2-8)
(2-8)
设螺栓夹紧部位在无应力条件作用下的长度为![]() ,则其可表示为
,则其可表示为
![]() (2-9)
(2-9)
在外部应力作用下,超声波声时即为夹紧部位超声波声时与未夹紧部位超声波声时的总和,即超声波声时![]() 为
为
![]() (2-10)
(2-10)
A是螺栓的灵敏度系数,其表达式为
![]() (2-11)
(2-11)
应力大小可表示为
![]() (2-12)
(2-12)
若已知螺栓灵敏度系数A和螺栓无应力作用下的螺栓超声波声时参数,则可以通过不同应力夹持的超声波声时差,求得当前所受应力大小,可通过螺栓紧固应力夹持设备进行标定拟合出螺栓灵敏度系数A。
2.3超声波声时差算法
对于超声波回波这种能量型的信号而言,其相对能量的偏移,能更好的估计计算超声波声时差,由于旋转扭矩的不断增大,其回波的能量会产生不同程度的偏移,这种偏移可以通过信号的时移相关性进行估计判断。离散信号的时移相关性函数![]() 表示为
表示为
![]() (2-18)
(2-18)
时移相关性算法分析能够以较小的数据量,通过相似度分析的方法,将数据分辨率由 ns 级提升至 ps 级。
三、实验及结果分析
超声波脉冲激励信号是高压信号,采用延时采样的方法,通过控制高速多路复用器,选通后级信号调理链路,对回波信号进行采样。通过超声回波声时差,长度为 31.74mm、47.20mm、130.35mm、181.48mm 螺栓的回波信号的相关数据计算结果如表3-1,3-2,3-3,3-4所示。
表3-1 试件螺栓测量数据表
20℃螺栓长度 (单位:mm) | 采集超声波回波峰 值声时差 (单位:ns) | 算法拟合后超声波回波峰值声时差 (单位:ns) | 螺栓长度 (单位:mm) |
31.74 | 5360 | 5361.354 | 31.739 |
5361.143 | 31.738 | ||
5361.241 | 31.738 |
表3-2试件螺栓测量数据表
20℃螺栓长度 (单位:mm) | 采集超声波回波峰 值声时差 (单位:ns) | 算法拟合后超声波回波峰值声时差 (单位:ns) | 螺栓长度 (单位:mm) |
47.20 | 7972 | 7974.351 | 47.208 |
7974.522 | 47.209 | ||
7974.648 | 47.209 |
表3-3试件螺栓测量数据表
20℃螺栓长度 (单位:mm) | 采集超声波回波峰 值声时差 (单位:ns) | 算法拟合后超声波回波峰值声时差 (单位:ns) | 螺栓长度 (单位:mm) |
130.35 | 22020 | 22019.602 | 130.356 |
22019.652 | 130.356 | ||
22019.598 | 130.356 |
表3-4 试件螺栓测量数据表
20℃螺栓长度 (单位:mm) | 采集超声波回波峰 值声时差 (单位:ns) | 算法拟合后超声波回波峰值声时差 (单位:ns) | 螺栓长度 (单位:mm) |
181.48 | 30656 | 30656.645 | 181.487 |
30656.883 | 181.489 | ||
30656.744 | 181.488 |
重复标定实验数据中,通过算法拟合后的超声回波声时最大差值作为拟合后的声时分辨率为声时分辨率![]()
测量数据平均相对误差为

|
|
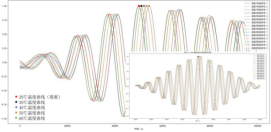
(a)螺栓标准件 31.74mm 回波信号对比图 | (b)螺栓标准件 47.20mm 回波信号对比图 |
|
|
(c)螺栓标准件 130.35mm 回波信号对比图 | (d)螺栓标准件 181.48mm 回波信号对比图 |
图3-2 不同温度下超声一次回波位置对比图
通过图3-2可以看出,螺栓的回波位置后移,且能看出在每个温度点时,超声波飞行时间刻度准确性较好。在超声波监测技术当中,还需要考虑超声波声速的温度补偿系数 对超声波声速的影响,该部分螺栓一次回波信号实验数据如表3-5所示。
表3-5静态条件下温度补偿标定实验数据
试件标号 | 1 | 2 | 3 | 4 |
20℃螺栓长度 (单位:mm) | 31.74 | 47.20 | 130.35 | 181.48 |
温度(单位:℃) | 超声波声时差(单位:ns) | |||
20.12 | 5359.033 | 7974.311 | 22020.317 | 30656.357 |
30.16 | 5364.679 | 7982.658 | 22043.426 | 30688.534 |
39.91 | 5370.224 | 7990.811 | 22065.876 | 30719.652 |
表3-5中超声波声时差数据均是经过三次连续测量取得的平均值,得到超声波声速的温度补偿系数 。
![]() (3-1)
(3-1)
基于该超声波声速的温度补偿系数的超声波声时差相对误差为:
![]() (3-2)
(3-2)
根据无应力作用的标准温度条件下超声波声时![]() 表达式
表达式
![]() (3-3)
(3-3)
将上述两式联立得到
![]() (3-4)
(3-4)
根据对于不同长度、超声波声时差的螺栓的灵敏度系数A的计算所定义的表达式可以计算出灵敏度系数为
![]()
![]() .97 (MPa/ns)
.97 (MPa/ns)
根据螺栓的灵敏度系数反演电子拉力机的拉力大小,计算得到的平均相对误差为
![]() (3-5)
(3-5)
根据灵敏度系数A和对应螺栓的所受拉力的横截面积,可以求得该设备最大测量误差为
![]() (3-6)
(3-6)
该螺栓紧固应力检测系统能够满足设计指标要求,通过螺栓的灵敏度系数的标定,能够通过较好的以超声波声时差和螺栓的夹紧前后的应力变化过程计算得到。
四、总结
采用超声波无损检测的方法进行预紧力的测量,基于金属的线膨胀过程和超声波声弹效应,分析了超声螺栓紧固应力检测原理,建立了螺栓轴向应力检测与超声波声时的对应关系。能够实现对不同螺栓在不同载荷情况下的应力检测和标定,提供超声波声时,通过超声回波声时差来表征螺栓形变过程及紧固应力变化,通过定量标定实验,实验数据与理论分析呈现线性关系,通过线性拟合将应力误差控制在0.5MPa以内,满足实际工程应用需求。
参考文献
[1]黄恭伟. 螺纹拧紧技术研究及拧紧机控制系统设计[D]. 合肥工业大学, 2007.
[2] 王勇, 倪庆成, 颜华萍, 林春. 力臂长度对扭矩扳子检定结果的影响[J]. 计测技术, 2015,
35(S1): 121-124.
[3] 黎小毛. 基于光弹性贴片法材料表面应变场测量实验研究[D]. 中国科学技术大学, 2014.
[4] 沈军, 林波, 迟永刚, 刘梅. 残余应力物理法测量技术研究状况[J]. 材料导报, 2012,
26(S1): 120-125.
[5] 贾雪, 王雪梅, 甘文成, 倪文波. 声弹性效应螺栓轴向应力标定实验研究[J]. 中国测试,
2018, 44(03): 23-27.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号