江南机电设计研究所 贵州贵阳 550009
摘要:针对导弹舵偏到俯仰角回路控制系统,考虑依赖模型设计的控制方法需要精准的对象控制模型,且参数设计复杂的因素,提出一种不依赖任何模型信息的导弹舵偏到过载的控制方法——无模型自适应改进控制。控制方案首先是基于紧格式动态线性化方法得到过载控制回路对象的等效数据模型,利用输入输出数据估计控制算法中的伪偏导函数,再根据控制算法计算出控制输入,不需要任何模型信息。最后针对静不稳定和静稳定特征点,在MATLAB中采用本文设计的无模型自适应改进控制算法进行仿真分析。
关键词: 导弹稳定控制;过载控制;无模型自适应控制;
OverloadControlofMissileBasedonImprovedModel-freeAdaptiveControl
LIU Ling-nan,ZHANG Ou,NING Fang-qing
(Jiangnan Electromechanical Design and Research Institute, , China)
ABSTRACT:About the weak points of missile stability control scheme depending on model design, this paper puts, considering that Model-free adaptive control (MFAC) method which designed without any model information and with simpler design of controller parameters.Through the control simulation of controlling rudder to overload, compared with the traditional PID control simulation, the model-independent control scheme is obtained.
KEYWORDS:Missile stability control; Overload control;Model-free adaptive control;
1
1 引言
由于防空导弹的动力学和运动学模型存在强不确定性和强非线性,而目前采用的控制方法严重依靠导弹系统的模型参数,即需要已知的数学模型才能设计控制器参数。由于稳定控制系统设计采用的方法是难以建立控制系统准确的数学模型,随着航天航空技术的发展以及各种天空威胁的新目标出现,为适应新的作战任务,防空导弹将会不断升级改造,这导致了导弹系统将变得越来越复杂,不可能建立控制系统准确的数学模型,因此导弹模型中非匹配和不确定性的特点越来越突出。
针对导弹模型的强不确定性和强非线性,以及传统控制系统分析和设计方法中存在的问题,需急迫发展一种基于数据驱动的、不需要训练样本且不依赖于导弹系统数学模型的稳定控制方法。基于无模型的控制技术不需要包含受控系统的内部模型的任何信息,仅需要系统的输入输出数。
2 导弹侧向过载控制回路数学模型
建立数学模型是进行导弹仿真试验的基础,导弹自身的动态特性由导弹数学模型来描述,通过计算施加在导弹各轴上的力和力矩,通过运动规律解算出导弹飞行中每一时刻的状态及变化规律。本文研究中假定,未扰动运动中侧向运动参数相对于其他运动参量为微小量,通过设定研究假设,可以认为三个通道间的耦合很微弱,即每个通道可独立研究,下面给出侧向稳定控制结构中建立的从舵偏到俯仰角到过载回路的数学模型。
以舵偏角![]() 为输入,俯仰角变化量
为输入,俯仰角变化量![]() 为输出时的传递函数为[2]:
为输出时的传递函数为[2]:
![]() (1)
(1)
其中![]() 是由动力系数
是由动力系数![]() 组合而成的系数。
组合而成的系数。
而俯仰角变化量![]() 到过载
到过载![]() 有一个正线性相关的关系,系数为
有一个正线性相关的关系,系数为![]() ,其中
,其中 ![]() 为导弹的运动速度,
为导弹的运动速度,![]() 为引力常数,
为引力常数,![]() 为一个常数值,即以舵偏角
为一个常数值,即以舵偏角![]() 为输入到过载
为输入到过载![]() 的传递函数为:
的传递函数为:
![]() (2)
(2)
需要注意的是,无模型自适应控制方案的控制器是不需要依赖该控制对象的数学模型进行设计的,数学模型(2)仅用来做控制仿真的数字实验。
2 无模型自适应控制算法设计
2.1 基于输入输出数据的紧格式动态线性化
考虑MIMO离散时间非线性系统:
 (3)
(3)
其中![]() ,
,![]() 是两个未知的正整数;
是两个未知的正整数;![]() 为未知的非线性函数,为使系统更具有一般性,系统输入扩张为
为未知的非线性函数,为使系统更具有一般性,系统输入扩张为![]() 阶,系统输出
阶,系统输出![]() 扩张为
扩张为![]() 阶,则有
阶,则有![]() ,许多复杂系统均可以用系统(3)进行表示,比如机器人系统。
,许多复杂系统均可以用系统(3)进行表示,比如机器人系统。
无模型自适应控制算法是不需要考虑被控对象的具体模型,为实现这一目的,需要对受控系统对当前工作点进行等价的数据模型建立,首先提出如下假设:
假设1 除有限时刻点外,![]() 关于第
关于第![]() 个变量的偏导数是连续的;
个变量的偏导数是连续的;
假设2 除有限时刻点外,系统(3)满足广义Lipschitz条件,即对任意![]() 和
和![]() 有,
有,
![]()
其中,

是一个常数。
从实际角度出发,上述对控制对象的假设是合理且可接受的,假设1是控制系统设计中对一般非线性系统的一种典型约束条件。假设2是对系统输出变化率上界的一种限制,从能量角度来看,有界的输入能量变化应产生系统内有界的输出能量变化,很多实际系统都满足这种假设。
记![]() 为相邻两个时刻的输出变化;
为相邻两个时刻的输出变化;![]() 为相邻两个时刻的输入变化。
为相邻两个时刻的输入变化。
为了将非线性系统(3)转化为动态线性化模型,有如下定理1:
定理1 对满足假设1和假设2的非线性系统(3),当![]() 时,一定存在一个被称为伪雅可比矩阵(peseudo Jacobian Matrix,PJ
时,一定存在一个被称为伪雅可比矩阵(peseudo Jacobian Matrix,PJ
M)的时变参数 ,使得系统(3)可转化为如下紧格式动态线性化(compact form dynamic linearization,CFDL)数据模型,
![]() (4)
(4)
并且![]() 对任意时刻
对任意时刻![]() 有界。
有界。
2.2 伪偏导数估计算法
对于离散时间系统,由最小化一步向前预报误差准则函数得到的控制算法有可能产生过大的控制输入,使控制系统本身遭到破坏,而由最小化加权一步向前预报误差准则函数得到的控制算法又有可能产生稳态的跟踪误差,因此考虑如下控制准则函数:
 (5)
(5)
其中![]() 为权重系数,
为权重系数,![]() 为系统的期望输出信号。将式(4)带入式(5),并对
为系统的期望输出信号。将式(4)带入式(5),并对![]() 求导,令其等于0,并化简可得系统输入
求导,令其等于0,并化简可得系统输入![]() 的表达式如下
的表达式如下
 (6)
(6)
其中![]() 是步长因子,
是步长因子,![]() 为权重系数。式(6)中的
为权重系数。式(6)中的![]() 未知,因此需要估计。下面对伪雅可比矩阵
未知,因此需要估计。下面对伪雅可比矩阵![]() 进行估计,考虑如下参数估计准则函数:
进行估计,考虑如下参数估计准则函数:
 (7)
(7)
对式(7)中的![]() 求导并令其等于0,可获得如下的参数估计算法:
求导并令其等于0,可获得如下的参数估计算法:
 (8)
(8)
其中![]() 是为雅可比矩阵的估计值,
是为雅可比矩阵的估计值,![]() 、
、![]() 为设定的正参数。
为设定的正参数。
2.3 控制其设计
式(2)是一个单输入单输出的控制对象,且时变非常迅速,直接应用传统的无模型自适应控制算法于控制时[3],结果发现,当动力系数![]() 大于零时,存在误差收敛速度慢,控制误差不断波动的问题;当动力系数
大于零时,存在误差收敛速度慢,控制误差不断波动的问题;当动力系数![]() 小于零时,为静不稳定系统,甚至无法控制,因此引入对前一步误差的控制可以得到改进的无模型自适应控制算法为:
小于零时,为静不稳定系统,甚至无法控制,因此引入对前一步误差的控制可以得到改进的无模型自适应控制算法为:
 (9)
(9)
其中:![]() 、
、![]() 是引入的控制环节的参数。
是引入的控制环节的参数。![]() 的估计算法和式(8)一致。
的估计算法和式(8)一致。
3. 仿真与实验
舵偏-过载角控制改进的无模型自适应控制结构如图1。

图1 MFAC控制系统结构
用设计的控制方案仿真的特征点参数见表1。
表1 特征点参数表
序号 |
|
|
|
|
|
1 | 1.1 | 110 | 162 | 0.7 | 0.15 |
2 | 0.09 | -40 | 71 | 0.5 | 0.1 |
对各特征点控制设计的控制器参数见表2。
表2 改进的无模型自适应控制器参数
序号 |
|
|
|
|
|
|
|
1 | 1000 | 10 | 0.5 | 1.5 | 60 | 400 | -0.4 |
2 | 1000 | 20 | 0.5 | 1.5 | 40 | 400 | -0.4 |
设定期望过载为幅值为1的阶跃信号,采样时间为0.001s,进行MFAC的控制仿真,并采用增量式PID控制方案[3],进行过载控制进行仿真对比,仿真都没有考虑惯性原件模型。
由于完全不依赖数学模型进行PID控制器参数调整难度仿真结果如图2。
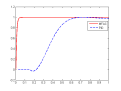

图2 MFAC与PID控制 图3 MFAC与PID控制
特征点1结果对比 特征点2结果对比
可以看出,两种方法在1s仿真时间内都能将控制对象过载控制到期望值,不过MFAC的控制效果相对快很多,响应迅速,MFAC对静稳定与静不稳定系统的控制误差结果如图3。

图4 MFAC控制下的系统误差(上:静稳定系统,下:静不稳定系统)
可以看出,MFAC控制器在采样点到达100之前,就将系统误差控制近零了。
4 结论
本文研究不依赖导弹的过载控制模型的控制问题,基于紧格式动态线性化方法进行无模型自适应控制器设计。针对传统形式的无模型自适应控制方案对快速变化、静不稳定的系统的控制存在有结果振动,收敛慢的问题,采用了改进的无模型自适应控制方法。为了验证本文本所提的控制方法的有效性将传统的无模型自适应控制方法与增量式PID加入对比研究。
仿真结果表明,相比于增量式PID控制方法,本文所设计的改进的MFAC具有更快的控制响应,且参数设计不依赖于控制对象的数学模型。
参考文献:
[1]侯忠生,金尚泰.无模型自适应控制-理论与应用[M].北京:科学出版社,2013:2.
[2]姜易阳.不同过载自动驾驶仪的对比研究[J].导航定位与授时,2016,3(1):40-46.
[3]李伟,谢华伟,韩俊庆等.基于无模型自适应PD控制的欠驱动船舶航迹控制[J].舰船科学技术,2022,44(13):21-25.DOI:10.3404/j.issn.1672-7649.2022.13.005.
[4]刘真,张涛.基于PID控制器的导弹稳定控制回路设计与仿真[C].//Thirteenth Chinese Conference,SSTA 2011(第十三届中国系统仿真技术及其应用学术会议)论文集.2011:696-701.
作者简介:
刘灵楠(1998-),女(仡佬族),贵州省遵义市人,硕士研究生,主要研究领域为导航、制导与控制。
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号



