广汽乘用车有限公司 广东省广州市 邮编:511434
摘要:
既然汽车检测能够实现一定程度的标准化作业,那么为何不更进一步实现智能化呢,以复合返修诊断方法作为基础,发展智能化诊断,实现用电脑完成原本由人完成的诊断工作,首先就需要电子化触发因素,这里首选不良节流率达到90%的初始化NG,作为信号输入。同时还需要构建一个计算机模型,此模型应当包含足够多的故障参数以供电脑运算,并最终得出较为准确、合理的结果。
关键词:汽车检测 智能诊断 电脑模型
现状:
尽管汽车电子电器如何变迁,初始化岗都保持十年前的模式,依旧是初始化结果以小票的形式被打印出来。运用复合返修诊断方法可以解决复合返修遇到的问题,但是对人的经验依赖程度较高,而经验的积累并不是短时间内可以完成的,为了改善这一现状,建立智能化的诊断,将可以较大程度消除这种依赖,让复合返修开启无人驾驶模式。
无纸化:现针对打印数据这块下手,其目的是通过一项技术,实现无纸化打印,把初始化单以电子版的形式进行打印并储存,从中提取NG部分作为触发信号。要做到这点需要引入打印机数据采集器,这块不作过多说明。
智能化诊断模型:对于初始化故障位置可以达到一定的诊断推测能力,可以精确到单回路范围内,再通过推测此单回路上的大概率点以某种形式出现故障,从而得到最终的输出结果。
以下就是复合返修智能化诊断示意图:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 初始化设备
初始化设备



![]()
![]()
![]()

![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]() 1 2 3 4 5 6
1 2 3 4 5 6
![]()
一、NG提取
如果把初始化NG作为一个集合,在这个集合中有且只有三个元素:单项形态、故障码形态、通讯故障形态。故这个集合可以记为:NG={单项形态,故障码形态,通讯故障经典形态},
此NG集合最多由这三种元素组成,也可由三者中的一个单独组成,因此称之为或集。NG集合中每一个元素都是一个子集:
1、单项形态={读取NG,写入NG,测试NG};
2、故障码形态={导线回路NG,控制器参数NG,执行器效果NG,传感器信号值NG};
3、通讯故障经典形态={ECU本体NG,电源NG,搭铁NG,CAN总线NG}。
处理NG就是对集合中的每个元素求解,从而得到解决方案。混合形态是可以拆解的,按照优先顺序:通讯故障>PBC型/单项>U型进行处理
二、诊断模型
由六层基础数据库依次叠加形成的计算机模型:
由模块全息与工序检讨组成诊断模型的前部,其语句结构符合主体与发生事件的陈述。
由故障码表与故障落点组成诊断模型的中部,把故障主体从抽象概念往实体方向转化。
由电路手册与故障类型组成诊断模型的后部,其语句结构符合主体与发生事件的陈述。
1、模块全息
由于整车控制模块太多,这些模块相互之间形成几个网络,网络之间又都由网关连接,由此形成整车电子电器的架构。接下来首推分模块的概念来整合这么多的控制模块。
驱动控制系:为车辆提供可控动力。
根据汽车的发展由来,最先进入电控的应该是驱动系统,发动机控制模块EMS从此诞生,随后是变速器也进入电控,TCU诞生,而取消了换挡拉索的线控换档,变速与换档操控分家,GSM诞生,由于电车没有变速器,但仍需P档驻车,变速中P档进入独立控制,PCU从TCU中分离出来。由此可得:
驱动控制系 | |||
EMS | TCU | PCU | GSM |
车身控制系:与驾驶员对接控制车辆。
接下来是直接受驾驶员控制的车身控制部分,一开始BCM集车身电器、车身防盗、网络关卡于一身,随着汽车电子电器技术的革新,防盗电脑与车身电器一分为二,变成无匙启动模块,而为了实现手机作为虚拟钥匙的功能,从PEPS分出来一个蓝牙模块。随着车身电器越来越多,BCM开始实行区域自治,门窗的控制独立出来,分为左右门模块,尾盖也要求独立形成电动尾盖系统, 至此四门两盖,BCM已所剩无几,灯光系统见状也纷纷表示有分割意向,形成前后左右四个灯模块,每个组合灯都可以独立控制。无线充电模块是新来的小伙伴,它来自于PEPS。随着ECU成员的不断增多,避免网络过载导致传输效率下降,分网成了必然的趋势,BCM无暇于网络关口的转包工作,只好把网关功能独立出来,独立网关由此而来。至此BCM手头上的控制对象已经不多了,有胎压、车内灯、雨刮、喇叭以及其LIN系统等。由此可得:
车身控制系 | |||||||||
BCM | PEPS | SBM | WCM | FDM | PLGM | GWM | LCM | LCMA | TPMS |
独立功能系:为车辆行驶提供独立的功能。
制动、转向、空调、安全气囊和座椅是五个独立存在的系统。这些模块都具备独特功能,用于完成驾驶,制动系统负责压制驱动控制模块的势头,同时一定程度的稳定车身,与其它模块配合可以自动采取紧急制动。转向系统进入电器化后,它负责按照车速适当助力转向,改变车辆行驶方向,与其它模块配合可以自主打方向完成自动驾驶。空调是用于调节座舱温度
的,有时也用于冷却某些发热部件。安全气囊是被动安全系统,平时比较低调,时刻守备。座椅控制主要有电动、通风、加热、记忆等功能。由此可得:
独立功能系 | ||||||
HVAC | HCP | SCM | EPS | BCS | EPB | SRS |
智能辅助系:辅助驾驶并让车辆更加智能化。
接下来就是智能辅助驾驶的音像与雷达系统,两大系统配合有效提高了车辆的感知能力,其中为首的主机分出来多个模块,一开始主机对后置摄像头享有支配权,随着摄像头增多,分出来一个全景模块管理前后左右四个摄像头,在显示这一块,主机除了主控屏的娱乐功能外,还需要一个屏幕来显示车辆行驶状况,于是分出一个组合仪表,为了方便驾驶员在开车时不用老是盯着仪表看车速,分出一个抬头显示器。在操控上,主机除了可以触屏,还针对不同客户需求,开启了传统按键操控,所以分出一个音响控制面板模块,为了有更好的音响体验,分出一个功放模块。而主机又作为车载以太网的载体,主机有连外网的网络天线,因此可以分出一个T-BOX模块用于实现远程操控,因为远程操控正需要连接外网才能完成。摄像头已增加到车内也有,于是又分出一个车内驾驶员或乘员监控模块,这里已经在人车交互的智能化道路上跨出了一步。前挡上还分得一个车道偏移模块,用于摄像行驶方向,发生偏移时报警,从而与其它模块配合实现半自动驾驶。雷达系统一开始只用于倒车雷达,随着智能化的提高,正前方、侧前方、后盲区也开始使用雷达预警,造成全雷达包围的局面,事实证明,雷达预警比影像更加灵敏,反应更迅速,听往往比看更不容易走神,所以雷达预警与影像相辅相成,共同辅助驾驶,在这其中自动融合泊车就是两者高度合作的智能化产物。雷达系统一共分出四个模块,分别是前雷达,也叫前碰撞预警,后雷达也就是倒车雷达,有时高配车型还包括侧前方的角雷达,盲雷达也叫盲区监测模块,它与前雷达,和车道偏移组成铁三角,可以实现一定程度的自动驾驶功能,最后就是内雷达,用于检测车内是否有乘员存在,防止一些意外锁车造成乘员被困车内的情况。由此可得:
智能辅助系 | |||||||||||
音像 | 雷达 | ||||||||||
AVN | FCP | ICM | T-BOX | SVM | IFC | OMS | WHDU | MRR | RPA | BSR | IPA |
整车模块四大族:驱动控制系、车身控制系、独立功能系、智能辅助系。以下是模块全息表,从表上面可以了解到的信息为车辆所配备的所有ECU,各自的网区分布以及所属网络。
| |||||||||||||||
驱动控制系 |
CN |
FB | TCU EN | PCU EN/BD | |||||||||||
车身控制系 | BCM IP | PEPS IP | SBM CN | WCM CN | FDM DD/PD | PLGM BD | GWM IP | LCM FB/BD | |||||||
独立功能系 | HVAC IP | HCP IP |
BD | EPS IP | BCS FB | EPB BD | SRS BD | ||||||||
智能辅助系 | AVN IP | FCP CN | ICM IP | T-BOX IP | IPA BD | SVM BD | RPA BD | MRR FB/FP | IFC BD | BSR RB | OMS BD | ||||
FAPA BD | |||||||||||||||
以太网 | |||||||||||||||
这里致敬了一下元素周期表,不同颜色代表不同网络,每个ECU的位置不能改变,上下、左右、对角相邻的ECU存在一定关系。
2、工序检讨
工序:汇总单个ECU初始化工序与部分前工序,由单项工序与广播工序构成,其中单项工序有写前读取、进行写入、写后读取、功能测试四大项,广播工序有读故障码、清故障码两项
检讨:汇总各工序NG时的应对措施,基本以重读、重写、重测为主。
编码:对各工序NG进行编码,定义三种NG形态所对应的编码组合,也就是说工序检讨包含了形态区分的信息,根据不同形态操作也有所不同,单项NG可以直接输出对策。故障码则需要在故障码表中查找故障含义所指回路,以把故障信息往电路方向实体化,转化为下一层的输入可识别对象。通讯故障则需要实体化为电源、搭铁、通讯、本体四大因素,再通过电路图查找相关因素。
工序检讨满足单个ECU的全工序概括,任意NG形态下都有工序NG与检讨措施一一对应,因此得到以下:

“¬”代表非。
3、故障码表
电控系统中,ECU通过监测其回路的电压、电流、电阻等物理量的变化来判断回路是否正常,当这些物理量发生过高或过低的偏差,会引起ECU报故障码,而回路电压的过高与过低则表示线路开路与短路。
故障码形态需要借助一份文件:故障码表,故障码表能够查找故障码含义,故障码表中的含义一般涉及四个范围:
故障码范围 | 故障对象 | 采取措施 |
①回路 | 线路 | 检测线路 |
②参数(软件) | 控制器 | 重写参数 |
③执行器效果 | 执行器 | 检查执行器 |
④传感器信号值 | 传感器 | 检查传感器 |
这里已经把PBC型故障码实体化为ECU某一控制回路或参数。
当它为回路故障时,设定此回路上故障落点为有限个实际对象,并且每个实际对象的故障类型也是具体的,这些实际对象可以对应到电路手册上的位置,这些位置存在何种情况需要人工排查确认。
如果故障码指明ECU中某个需要标定的参数丢失,会导致控制逻辑缺陷,修复软件或重新配置参数可以得到解决。因此这类故障码按照工序检讨中单项形态的处理方式进行处理。
4、故障落点
PBC型故障码与ECU通讯故障的故障落点有所不同,PBC型故障码落点主要是在单一回路上,而通讯故障落点主要包含四大因素,其中根据电控系统的不同故障表现区分为失效与限制的不同落点,电源和搭铁两方面的落点故障,其表现是电控系统的完全性失效,而通讯仅仅会让电控系统功能受到限制。落点信息存在的意义是作为电路手册中的搜索对象,最后形成实际落点信息。以下便是故障码与通讯故障的故障落点:

5、电路手册
故障码和通讯故障都需要借助一份文件:电路手册,用于搜索发生事件的承受主体。
通讯故障形态呈现固定组合,无需查找故障码表,因为一个通讯故障的ECU,没有可以解读的网络信息,同时由于ECU通讯故障,此ECU的初始化全工序未满足进行条件,包括写前读取、信息写入、写后读取、功能测试、故障清读等一系列操作都无法进行或未能完成。
CAN总线就像是一个会议室,由各个ECU作为成员参与其中。而LIN更类似于某个成员的私人幕僚,幕僚的信息只服务于这个成员,而没有直接参与到会议中来。LIN网是专用网络,用于传输一组专项信息,由一个主节点和若干个副节点组成,副节点作为主节点的分模块,副节点信息全都汇聚到主节点,再由主节点转发到CAN网络上,LIN通讯故障由单项与U型故障码形成固定组合,其中U型故障由LIN网主节点报出,表明LIN网上某个副节点模块丢失通讯。
无论是CAN还是LIN,当发生通讯故障时,只需在电路手册中查找ECU本体、电源、搭铁、总线四大影响通讯的因素即可。因此,造成通讯故障的四大因素可以在电路手册上实体化出有限个实际对象,并且每个实际对象的故障类型也是具体的,这些位置存在何种情况需要人工排查确认。
电路图是PDF文件,支持各种搜索功能,能够按要求搜索按照故障落点在整个电路图中自动搜索目标对象,本层定义了事件发生的主体,明确了故障发生的具体位置,以下是电路图所能搜到的所有信息,对于故障的定位至关重要,它可以落实故障落点的所有信息,查找精确达到线束中某根导线,插头中某个端子的级别:
⑴、电源线端子号 | ⑵、电源档位 |
⑶、接地线端子号 | ⑷、保险丝编号 |
⑸、所经插头端子号 | ⑹、所经插头 |
⑺、各传感器名称 | ⑻、所经焊点编号 |
⑼、各执行器名称 | ⑽、控制单元名称 |
⑾、传感器端子号 | ⑿、LIN线端子号 |
⒀、执行器端子号 | ⒁、目标所处位置 |
⒂、CAN总线端子号 | ⒃、接地点编号 |
⒄、各端子定义 | ⒅、插头端子编号 |
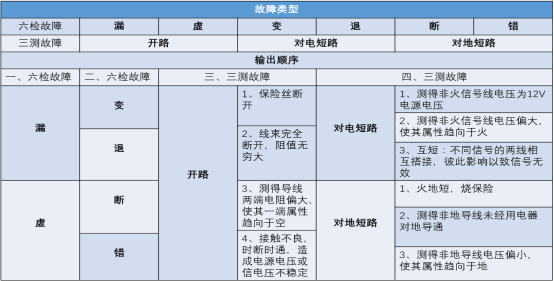
6、故障类型
六检三测几乎集合了所有的线路故障类型,本层承接上层主体,明确作为正在发生的事件,同一个主体可以承受不同事件的发生,因此这里还设定了故障类型的输出顺序需按照先检后测进行,同一批次输出的故障类型具有相类似的事件性质和操作手法,某处何故就是作为最后的输出标准格式。一般而言,最后是把解答题转变成选择题,需要人工对每个选项进行排查,直至发现故障。
总结:
NG集合的求解可以概括成三种诊断策略:
![]()
![]() 1、单项NG工序检讨输出对策。
1、单项NG工序检讨输出对策。
![]()
![]()
![]()
![]() 2、故障码 故障码表 故障落点 电路手册故障类型。
2、故障码 故障码表 故障落点 电路手册故障类型。
![]()
![]()
![]() 3、通讯故障 故障落点电路手册故障类型。
3、通讯故障 故障落点电路手册故障类型。
再通过与模块全息表进行整合得到以下智能化诊断模型:

![]()
![]() 故障码表
故障码表
![]()
![]()
![]()
![]()
![]()
![]()
![]() NG{ } 模块全息 工序检讨 故障落点 故障类型 输出处置
NG{ } 模块全息 工序检讨 故障落点 故障类型 输出处置
![]()
电路手册
![]()
处置建议:
处置建议的输出需要按照上层设定的顺序作筛选展示,提示操作人员逐步排查问题,在这里就不展开说明了。
参考文献:
1、臧杰\阎岩主编,汽车构造:上册,北京:机械工业出版社,2005.7(2008.1重印)
2、臧杰\阎岩主编,汽车构造:下册,北京:机械工业出版社,2005.8(2008.1重印)
3、毛峰主编,汽车车身电控技术,北京:机械工业出版社,2004.1(2008.4重印)
4、张西振主编,汽车发动机电控技术,北京:机械工业出版社,2004.1(2008.1重印)
5、娄云主编,汽车电器,北京:机械工业出版社,2004.6(2007.7重印)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



