龙煤鸡西矿业有限责任公司城山煤矿选煤厂 158100
【文章摘要】:
针对发电厂输煤廊道运行过程中设备运行状态的例行巡检相关任务均以人工巡视为主,如输煤皮带跑偏、皮带撕裂、漏煤/堵煤、托辊异响/过热、电机/减速器/轴承端盖等过热等问题,挂轨式巡检机器人主要应用于热电厂的输煤廊道巡检任务。为减轻巡检工作人员的劳动强度,提高巡检效率,保障输煤系统的安全运行,论文设计一套智能机器人巡检机器人能够替代人工在危险的煤廊环境中进行巡检作业,借助摄像头以及各种检测仪表,以图像形式对整个管廊情况进行管理,可实时对管道中皮带跑偏,有无漏煤,工作面是否撕裂等内容进行巡检,可对异常声音,异常温度进行报警,并可对收集到数据自动分析做报表。该系统采用标准化设备分类及数据管理,数据可靠真实,可追溯,不受工作人员的经验水平以及心理状态影响。该智能巡检机器人采用高性能电池,配合分布式自主充电,可随时对管廊进行巡检。
【关键词】:输煤廊道 挂轨机器人 深度学习
一 引言
火力发电作为我国社会用电的主要力量,占比接近总容量的70%。其中输煤系统是保证电厂安全正常运行的重要环节,是燃煤电厂的生命线。目前主要对输煤廊道的巡检方式依旧是人工巡检,巡视人员定期对廊道设备进行巡视,在输煤廊道内判定廊道内设备情况时以目测为主,方法单一、粗放。这种巡视方式工作效率低,无法进行高频率的来回巡检,存在工作盲区。为了降低人工成本,提高巡检的工作效率,设计开发一种新型智能机器人巡检系统,巡检系统依靠移动巡检机器人本体,视觉检测系统实现,依靠对整体进行调度管理的软件系统,智能算法的控制系统来管理整个系统,移动模块采用可沿轨道自由运动的机械系统,视觉检测系统主要由高清摄像头、红外检测仪、声音探测器、传感器等完成。新型智能机器人巡检系统解决了人工巡检的弊端,也提高了工作人员的安全性,对煤矿的安全高效生产以及发展前景有着重要意义。
1.1 人工巡检与巡检机器人对比
输煤系统生产环境相对较差,特别是输煤皮带廊道上的作业,现场设备长周期运行,设备不定期会出现各类异常,主要采用人工巡检排查故障,但是人工巡视检查过程耗时费力,工作效率低下,不够及时性、可靠性差,花费人工较多,巡视手段比较单一,主要依靠巡视人员通过经验判断输煤设备的异常状态来确认故障原因,尤其人工在夜间巡视过程中,光线不足的情况下,巡检人员即使携带手电筒配合照相机使用,也往往无法有效观察和记录输煤皮带廊道设备的隐患情况,同时由于环境相对恶劣,巡检人员存在较大的安全风险。输煤廊道选用机器人巡检代替人工巡检,1.巡检大大效率提高,短时间内可以完成对输煤廊道的监测。2.检测精度提高,对于现场温湿度、粉尘浓度、声音变化的数据精度大大提高,有效的检测出隐藏危险。3.增加巡检安全性,巡检机器人代替工作人员在恶劣环境下巡检,提升了工作现场的安全性。4.巡检机器人具有完整的一套系统,可以自主充电,自主传输信息,可以长周期的监控设备安全。
1.2巡检机器人国内外研究现状
早期时候加拿大魁北克水电研究院的 Serge Montambault, Pouliot 等人 2000 年研制了 Line Scout 巡检机器人的研制工作[1-4],如图1-1,日本关西电力公司和日本电力系统公司Paulo Debenest等人共同研制出了名为 Explainer的远程遥控输电线路巡检机器人[5-8],如图 1-2所示。两个移动单元在导轨上滚动前进并可以实现升降、旋转、跨越障碍物,操纵器调整平衡锤的位置。Explainer 是基于主体上端两个滑轮内部的合成橡胶与电线的摩擦方式进行移动,滑轮由直流电机驱动。两滑轮通过一根水平基座杆相连,连接部分能绕竖直轴旋转。前轮上搭载了两个传感器用来检查线路是否完整安全。下部搭载着一个2自由度的机械手。


图1.1 Line Scout 巡检机器人 图1.2远程遥控输电线路巡检机器人
伴随着 SLAM 与人工智能技术的发展,国内市场上涌现出许多无人值守式智能巡检机器人。这些巡检机器人拥有良好的机动性以及灵活性,融合无线通信、障碍识别、路径规划、自主定位等技术,能够在相对稳定的环境中完成巡检工作。当工作人员制订好机器人巡检任务后,机器人会自主规划巡检路径进入现场环境,巡检过程中会实时传输环境信息至监控中心。江苏亿嘉和信息科技有限公司研制的轨道式变电站巡检机器人[9,10],如图1-3 所示,导向轮与轨道面滚动接触,利用齿轮齿条进行驱动。导向机构的导向轮组夹持在轨道的导轨面上,由于导向块可旋转的安装在支撑杆上,当机器人沿轨道行进到弯道时,导向块发生旋转,使得导向轮组顺着弯道转动。此外,驱动机构可以左右移动,也可自适应于弯道,无需借助辅助装置。导向轮组包括倾斜设置的上导向轮和下导向轮,上导向轮、下导向轮夹持在轨道的导轨面上,将导轨面夹在两导向轮之间。上、下导向轮的倾斜角度可调,实现上、下导向轮之间的距离及导向轮圆周面的调整。王盟锜等人设计了室外高空轨道式移动巡查机器人
[11]。如图 1-4 所示,此巡查机器人包括步进电机及变速传动装置、车轮、蓄电池、充电插头以及机加工件和外壳组成。本体在步进电机的驱动下左右四车轮带动本体在轨道上实现前后移动,通过增加前后限位的方式,解决了巡检机器人面对轨道弯曲转向移动的问题,从而以极低的成本实现机器人的转弯功能。该机器人通过在轨道上安装无源射频卡的方式以及对轨道式巡检机器人的行进定位方式,实现了对机器人的远程控制以及实现机器人的定点测控。轨道式巡检机器人的测控软件通过机器人运行速度和定位标签的双重校正方式实现机器人在轨道上的定位,用户可以通过测控软件将机器人遥控到轨道上的预定位置。同时该巡检机器人可以自动充电,自动处理获取数据,当发现危险情况实现自动报警。

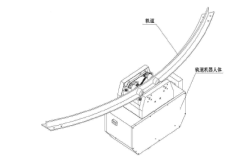
图1-3 轨道式变电站机器人 图1-4高空轨道式机器人
如图 1-5所示的是我国大立科技股份公司的推出的 DL-RC63 机器人,该机器人用于城市变电站的日常巡检。机器人配备有高清摄像机,能自动探测主要的设备与接头的温度、变压器与 CT 充油设备的油位计显示;拥有噪声识别功能,主动发现设备异常;拥有良好网络通讯功能,能与本地监控系统进行信息交互;在监控人员制定好巡检任务时,机器人会自主规划路径前往各个待检测点完成巡检任务;在巡视过程中电量过低时,机器人会自主前往充电仓。如图 1-6 所示的是我国信同信息科技的型号为 XT-IRT-JJ 管廊巡检机器人,该机器
人是一款轨道式巡检机器人。该机器人拥有精准的定位功能,能够自主寻找重点监控设备与智能追踪可疑目标。机器人搭载有超声雷达、云台摄像头、热成像仪与多种传感器能够对综合管廊内部进行全方位的监测。机器人最大移速15m/min,最大爬坡斜度20,支持定时巡航。


图1-5轮式变电站巡检机器人 图1-6管廊巡检机器人
巡检机器人还未在市场上完全普及,许多发电厂还是依靠人工巡检,人工巡检存在太多弊端,因此,新型智能挂轨巡检机器人系统的设计与开发有着巨大的意义以及发展前景,为发电厂的安全运行以及工作人员的生命安全保驾护航。
二 挂轨机器人总体设计
挂轨智能机器人整个系统主要包含监控平台、智能移动机器人系统、通讯系统、控制系统、检测系统、清洗系统、充电系统等。其中,监控平台为系统后台监控平台,起到监控和故障诊断的作用,与各系统通过通讯系统进行通讯;控制系统能实现对智能移动机器人系统、检测系统、清洗系统、充电系统等的控制;移动机器人系统实现巡检功能;清洗系统实现对移动机器人的清洗功能;充电系统实现移动机器人的自主充电。系统的整体框图如图2-1所示。

图2-1 智能巡检系统
2.1 监控平台总体架构
监控平台是以微服务架构为核心,以主流的关系型数据库、内存数据库、高性能消息队列等技术为基础,结合物联网、云计算s、Hadoop集群等相关技术,以组件化开发的方式实现面向智能巡检行业可定制、易扩展的综合性管理平台,系统采用B/S架构进行设计,易扩展,支持二次开发。智能巡检机器人监控系统主要包含三个:
车载监控系统:利用激光雷达、红外热像仪、视频服务器、高清摄像机,通过工业级无线AP与本地监控端的无线AP建立网络连接。
本地监控系统:为对智能巡检机器人进行操作与监控的终端,布置在站内,并在整个巡检区域内建立完整的无线网络,实现客户端与车载端的双向数据交互。同时,本地监控端通过硬件防火墙与专网,连接到运维站的远程监控后台。
远程监控系统:通过前端传输信息数据,进行分析,远程监控系统做出指令,对设备产生状态预警
系统软件主要由表现层、控制层、业务层、数据层组成,表现层无实质业务逻辑,主要提供与用户交互的操作业界,接受用户的操作请求,数据展示,是用户与系统的交互接口。控制层主要负责系统对外接口,提供统一的RestfulApi接口,实现数据交互。业务层:是对系统所有功能单元业务层面的封装,负责具体实现相关的业务逻辑,如任务管理、巡检计划、历史查询、数据分析等。数据层:主要实现对数据的存取, 文件存储用于解决巡检的音视频数据的保存, 缓存用于提高读写速度, 增强系统的相应性能, 数据库用于存储各类关系型数据。应用层:主要为用户界面、图形化电子地图和用户管理,目前比较常用的是web交互即b/s架构方式,其优点可以在任何地方进行操作,而不用安装任何专门的软件,只要有一台能上网的电脑即可,客户端零维护。现场配置及功能:通过自主遥控的模式实现对挂轨机器人的远程控制,完成对输煤廊道的实时监控,代替人工完成繁、难、险的巡检工作。
2.2机器人本体系统设计
智能挂轨式巡检机器人结构如图所示,它是一种基于轨道行走式挂载系统,可以与高清摄像仪、红外检测仪,声音传感器、温湿传感器、声光报警器、交互式语音对讲平台搭配使用,达到巡检的效果。系统采用通用软硬件平台控制,全工业化器件设计,运行稳定、安全可靠,具体可根据需求选用,主要组成系统如图2.2所示:

图2.2 巡检机器人
(1)检测系统
检测系统是巡检机器人的主要功能,根据输煤廊道的特殊环境,选用合适的视觉系统、红外热成像仪、声音传感器、温湿传感器、粉层传感器与机器人本体搭配,实现对输煤廊道各个参数的监控。
视觉检测图像采集采用高速全局曝光相机处理高速移动的物体,利用全局曝光相机对煤堆,皮带,异物,消防栓等进行拍照,准确地监视皮带是否跑偏和撕裂,通过后台检测系统图像分析、后台算法服务系统对采集的视频或者图像进行解析与分析,经过视觉系统判断故障后,根据故障等级的不同,会采集预警信息并上传预警信息到后台。后台根据故障等级的不同,会采取声音,灯光预警的方式告知设备操作员预警的类型和等级。提示操作员采取措施来消除预警,很好的做到了监控的作用。
采用机器人定点拍摄结合热红外感知的方法,通过判断图像中固定区域的温度阈值,来判断检测设备的温度是否超标。如果温度超过了阈值,后台会发出预警信息,并把检测到的温度通过热红外图像发送到后台报警系统,报警系统发生预警,提醒操作员采取措施消除预警。
首先采集机械故障时候的声音,对故障声音进行标记,然后将声音信号送到LSTM网络中进行训练和学习。经过训练收敛的模型可以提取出来,用于部署到后台服务端,当需要检测现场声音的时候,将采集到的声音送到模型中进行预测,就可以判别出声音的故障类型。产生故障后及时产生预警,提醒操作员机械产生了故障,以便造成不良的后果。
(2)驱动系统
驱动系统主要由三个部分组成,第一部分是驱动机构,通过电机带动,驱动轮运动。第二部分为预紧机构,通过螺栓增加驱动轮与轨道的摩擦,从而达到增加动力效果,第三部分是转向机构,通过转向机构运动,机器人有良好的过弯能力,拥有良好的过弯能力,机器人可以完成复杂地形无死角检测,减轻人工巡检的负担。机器人采用电池供电,动力充足,满足不同坡度以及弯道的行走。当电池达到一定电量时,机器人自动返回邬站,完成充电。驱动方案示意图如图2-3所示:

图2-3 驱动机构方案图
(3)自主充电
鉴于输煤廊道环境需求,机器人用无线充电方式为机器人充电。输煤廊道设计机器人充电邬站,当机器人电量低于20%时,机器人本体驶入坞站,车端充电极将桩端充电极向内压入,两者正面紧密对接,同时定位机构检测机器人本体到位,本体停机,开始充电。供电系统采用稳压隔离24v锂电池供电,满足传感器所需电压,在安全电压范围,锂电池供电安全可靠,不会设备产生不良影响。充电方案示意图如图2-4所示:

图2-4 充电方案示意图
(4)自清洁
机器人本体工作环境粉尘浓度较大,机体及轨道上容易堆积粉尘,粉尘在机器人本体上可能遮挡传感器影响工作,在轨道上容易导致驱动轮打滑,因此机器人本体具备自清洁和轨道清洁能力,通过高压气体对机器人以及上的粉层吹散,完成自清洁功能。
在机器人顶部设多个风扇,对准机器人运动前部轨道吹送,将粉尘吹走;机器人本体清洁方案如图*所示:在坞站中设置若干高压气碰头,机器人进站后喷出高压气体,将机器人本体上堆积粉尘吹散。

图2-5 轨道清洁方案

图2-6 机器人本体清洁方案
(5)防护系统
面对输煤廊道的恶劣环境情况,对于机器人本体的防护极为重要,机器人主体结构采用防护等级IP65,可以保证车体在恶劣情况下可靠运行,同时机器人本体前后对称各设置若干超声波传感器,当检测到前方有障碍物时,机器人减速停车,机器人最外围也同样设置了包覆柔性防撞块;
2.3 通信系统
通信系统采用无线传输方式,机器人通过无限网把采集到的信息发送给后台,后台进行分析,因此需要配有车载无线通信设备,用于连接巡检空间中构建的局域网,与服务器通信。每隔150m-200m内放置一台天线一体化基站设备,从而完成整个廊道内部的无线网络覆盖,基站设备通过光纤与监控室建立连接,如图2-6所示是通信网络拓扑结构。每个巡检机器人上安装一台快速移动漫游客户端设备,当机器人在廊道内移动时,可在廊道内每个基站设备之间快速漫游。机器人车体上搭载的快速移动漫游客户端设备可以实现巡检机器人的视频和数据的实时传输。

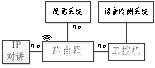
图2-6通信网络拓扑结构
三 总结
本文提出的挂轨式智能机器人系统,主要运用于输煤廊道。设计了完整的系统,其中包括后台监控系统、网络通讯系统、轨道转送系统、机器人本体系统等,其检测手段齐全,可对输煤廊道温度、粉尘浓度、皮带、滚筒等进行检测,通过网络通信系统以及后台监控系统的高效配合,可以快速对产生问题的设备进行预警,巡检机器人可以长周期的进行工作,自主充电、自主清洗,完成智能化,实现无人值守的巡检机器人。该系统具备了在煤炭以及相关行业中发展的潜力,应用该系统可以帮助企业完成高效高产、安全化的企业目标,也可以帮助煤炭行业朝安全生产、健康发展方向前进一大步。
参考文献(10条以内、没有可不写)
[1] Montambault S., Cote J., St. Louis, M. Preliminary results on the development of ateleoperated compact trolley for live-line working [C]. IEEE International Conference onTransmission and Distribution Construction, 2000:21-27.
[2] Montambault S., Pouliot N. The HQ LineROVer: contributing to innovation in transmissionline maintenance[C]. 2003 IEEE 10th International Conference on Transmission andDistribution Construction. 2003:33-40.
[3]Montambault S., Pouliot N. On the economic and strategic impact of robotics applied to
transmission line maintenance [C]. International Conference on Live Maintenance. 2004:69-80.
[4] Montambault S., Pouliot N., Lepage M., et al. Remote-controlled vehicle designed to bemounted on a support and capable of clearing obstacle [C]. International Conference onWorld Intellectual Property Organization. 2005: 52-57.
[5] Debenest, P., Guarnieri, M., Takita, K., et al. Expliner - Robot for inspection of transmissionlines[C]. IEEE International Conference on Robotics and Automation, 2008:3978-3984.
[6] Debenest, P., Guarnieri, M. Expliner — From prototype towards a practical robot for
inspection of high-voltage lines[C]. International Conference on Applied Robotics for the
Power Industry (CARPI), 2010:01-06.
[7]Debenest P., Guarnieri M. Robot for Inspection of Transmission Lines-Electrical and
[8]Mechanical Development[J]. Institute of Electrical Engineers Journal B,2010,130(5):
469-472.
[8] Debenest P., Guarnieri M., Takita K, et al. Expliner-Toward a Practical Robot for Inspection
of High-Voltage Lines[M]. Field and Service Robotics. Springer Berlin Heidelberg, 2010:45-55.
[9] 王泽,赵伟,许春山,等. 一种机器人行走机构[P]. CN205415603U, 2016-08-03.
[10] 王泽,赵伟,许春山,等. 一种移动机器人导轨[P]. CN205438532U, 2016-08-10.
[11] 王盟锜. 室外高空轨道式可移动巡查机器人的研究[J]. 仪器仪表用户, 2019, 26(02):31-35.
作者简介:尹琳1965.01. 男,黑龙江,汉,本科,高级职称,选煤。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号