辽宁科技大学,辽宁 鞍山 114051
摘要
随着科技的发展人工智能、AI等也都在不断崛起,现如今加油站还采用人工进行汽油的加灌。人为操作导致的灾难经常发生,而且等待时间比较长。基于此本设计提出一款能够自主进行液体加灌的机器人。可以实现用户到加油站可直接在机器人身上扫码付款。付完款后只需熄火在车内等待,机器人自动移动到车辆加油口,进行加油操作,当油量加完后发出提示信息,车辆就可以驶离。这样不仅减少了人工加油的危险性,还使加油效率提高了。
关键字:ARM、自主加液、机器人
1 引言
随着我国经济社会的快速发展和综合国力的增强,城乡居民生活水平显著提高,消费质量明显改善。国内消费市场持续完善,消费环境不断优化,公共设施覆盖率提高,社会服务更加全面,城乡居民从吃穿住用的品质,能够享受的医疗教育服务水平,都发生着重大的变化,生活质量不断提高。同时智能化是现代社会发展的一个趋势所在,像手机智能化就已经普及,人工智能、AI等也都在不断崛起。因此,设计一款基于ARM的加液机器人是十分有必要的。人工进行汽油的加灌,有时操作不当会引发危险,而且等待时间比较长。加油完毕后还得去自己缴费,这样就导致后面需要加油车辆需要长时间等待,并且容易造成拥挤。在新闻上也会经常看到人工加油操作不当导致汽油泄漏引发火灾,还有就是油枪没拔车辆就开走导致加油设备损坏以及人员受伤[1]。所以,提出一款能够自主进行液体加灌的机器人。
2 加液机器人简介
自主进行液体加灌的机器人,主要由行驶底盘机构、机械臂机构以及控制系统组成。行驶底盘机构采用履带式四电机驱动方式,这样可以使其运动稳定性高、速度快。机械臂机构采用6自由度机械臂、机械爪和机械吸盘。控制系统主要以STM32为主要的处理芯片控制整个机器人系统的运行,其外接传感器有D435摄像头、激光测距传感器以及噪声检测传感器。外接电路有蓝牙通信电路、降压电路、语音播报电路、电机驱动电路、机械驱动电路和显示电路。当用户驱车驶入加油站时,激光测距以及摄像头检测到有车辆驶入,并停止在加油区,此时系统控制语音播报电路对加油车主进行语音提示,并通过摄像头检测车主以及车辆座位前排,驱动行驶底盘使得机器人行驶到车辆前排位置方便车主扫码加油。车主通过手机扫描机器人屏幕上的二维码,与加液机器人建立联系,然后车主通过小程序进行登录设置加油量或者加油金额,并进行付款。当车主付完款后,加液机器人通过噪声检测传感器检测车辆是否熄火,如果没有熄火再次通过语音播报进行提醒,让车主进行熄火,并提醒车主打开车内打开加油外盖。然后加液机器人进行工作,通过摄像头定位汽车加油口,通过机械吸盘将加油口外盖拉开。通过摄像头检测到加油外盖打开后,然后精准定位控制机械爪将加油口内盖两侧夹住控制机械臂旋转将内盖打开。最后将加油枪递进加油口进行加油,并进行出油量记录,当到达支付油量时停止加油,将加油枪抽离。通过机械爪将内盖拧紧,并通过机械吸盘将外盖关闭,加油完成通过语音播报电路对车主进行提醒,可以启动离去。通过加液机器人减少了人工操作,减少了危险事故的放生,并且提高了加油的效率,解放了工作人员的双手。
3 硬件电路设计
3.1 系统硬件结构设计
加液机器人系统主要采用STM32F103ZET6为主处理器,并设计有传感器系统以及外围电路,本设计系统原理框图如图1所示。
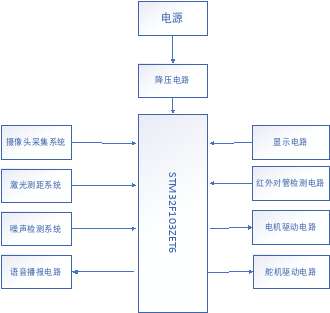
图1 系统原理框图
其传感器系统包括:摄像头采集系统、激光测距系统以及噪声检测系统,外围电路包括:降压稳压电路、摄像头采集电路、红外对管检测电路、语音播报电路、机械臂驱动电路以及电机驱动电路。
3.2 电路设计
3.2.1 STM32103ZET6最小系统设计
STM32103zet6的最小系统电路主要有主处理器STM32F103ZET6如图2所示,以及外设电路组成。其外设电路主要包括:晶振电路、复位电路、以及滤波电路。TM32F103ZET6核心板具有高性能的ARM® Cortex™-M3 32位的RISC内核,并且其工作频率可达到72MHz,而且内置还有高速存储器(高达128K字节的闪存和20K字节的SRAM),具有丰富的增强I/O端口而且这些I/O都是引出的[2]。

图2.stm32103zet6主控芯片
含有2个12位的ADC、3个通用16位定时器和1个PWM定时器,还包含标准和先进的通信接口。具有144个引脚口以及多个定时器、串口通信通道、还支持SPI和I2C通道。资源丰富、运行速度快,可以使整个系统运行稳定。
3.2.2 供电电路设计

图3 系统供电电路
设计的供电电路,如图3所示。其LM2937-3.3V降压电路输出电压主要供给主控处理器STM32F103ZET6,其LM2937-5V降压电路输出电压主要供给摄像头采集电路、红外对管检测电路、显示电路、语音播报电路、电机驱动电路以及舵机驱动电路。其3.3V降压电路主要采用的是LM2937-3.3V降压芯片,在其输出的与接地端并联两个电容其值分别为470UF和104。其5V降压电路主要采用的是LM2937-5V降压芯片,在其输出端与接地端并联两个电容其值分别为470UF和104。在降压电路中并联电容起到了稳压作用可以更好的是整个系统进行工作。
3.2.3 电机驱动电路设计
本设的加液机器人其行走机构采用的四个电机驱动的方式,所以需要两个TB6612FN驱动模块,其VM端口接电源供给电机,VCC端口接由LM2937-5V降压模块输出的5V电压,供给逻辑电路。其输出端AO1、AO2、BO1、BO2分别连接电机端,其AIN1、AIN2、BIN1、BIN2为驱动芯片四个输入端,通过单片机输入0,1状态组合可以控制电机正、停、反三种不同状态[3],如表1所示。
表1 电机运行状态控制表
电机状态 | IN1 | IN2 | IN3 | IN4 |
正转 | 0 | 1 | 0 | 1 |
反转 | 1 | 0 | 1 | 0 |
停止 | — | — | — | — |
经过输入端AIN1、AIN2、BIN1、BIN2控制其电机转向状态后,单片机通过定时器通道连接电机驱动PWM端口,通过程序使其输出不同占空比控制电机转速。
将电机驱动与STM32F103ZET6的I/O进行相连接,其PWM口即速度控制端口分别连接定时器TIM4的四个通道这样就可以通过程序控制输出PWM波形进行速度调制。对于电机驱动方向控制端口AIN1、AIN2、BIN1、BIN2分别连接相应I/O口,通过主处理器输出高低电平就可以控制电机转向发生变化,进而实现前进、后退、左转、右转等功能。
3.2.4 摄像头采集电路设计
本设计所采用的摄像头为OV2640摄像头,其工作电压在3⁓5V,体积小精度高,其与STM32F103ZET6引脚连接图如图4所示。

图4摄像头引脚连接图
OV2640是采取先读一行像素,再跳到下一行重新开始读取新一行像素,其输出时序图如图5所示。

图5输出时序图
3.2.5 舵机驱动电路设计
本设计的机械臂采用六个舵机进行控制,舵机工作电压为6V。六个舵机其供电口接TPS63070降压电路输出端,TPS63070降压电路输出电压可以达到6V。其控制端分别接STM32F103ZET6处理器的PA1、PA2、PA3、PA6、PA7、PB0端口。连接处理器内置的定时器TIM2的CH2、CH3、CH4通道以及TIM3的CH1、CH2、CH3通道,提供程序使其端口输出PWM波利用占空比来控制舵机转角,其舵机连接图如图6所示

图6 舵机驱动电路
3.2.6 显示电路设计
TFTLCD电阻触摸屏也是一种薄膜晶体管液晶显示器,其液晶屏幕上在每一个像素点上都设置TFT晶体管,可以抵抗扰动使得其工作状态静态特性和扫描线数没有关系,这样可以大大提高所显示出来的图像质量,并且此屏幕可以显示彩色信息。

图7 LCD引脚连接图
功能强大具有800×480的分辨率、16位真彩显示以及自带触摸屏,可以作为控制电路运用在本设计中,其屏幕引脚图如图7所示。
4 系统软件设计
加液机器人通过RM处理器控制整个系统,采用STM32F103ZET6控制器,通过软件编写程序使整个系统正常运行,其控制流程图如图8所示。

图8 系统控制流程图
加液机器人可以位于加液枪附近,通过激光测距传感器来检测是否有车辆驶入,当检测到有车辆驶入时,处理器接收到工作指令开始工作。通过摄像头寻定车辆驾驶员位置,然后控制电机使机器人移动到驾驶员位置,通过触摸显示屏,显示连接二维码,然后通过语音播报提醒熄火并扫码设置油量及支付金额。如果没有支付完成则继续等待并语音播报提醒,当机器人检测到已支付完成,则往汽车车尾驶去,并寻定加油口位置,使得机器人行驶到汽车加油口位置。然后检测汽车抖动进而判断车辆是否熄火,如果没有熄火则语音播报提醒熄火,当检测到已熄火则播报提醒打开加油盖,通过摄像头锁定加油口外盖,然后控制机械臂末端控制机械爪吸盘将加油口外盖拉开,然后通过机械爪手锁定加油口内盖旋转机械爪将内盖取下,然后将加油枪放入开始加油。当达到设置油量时停止加油,拿出加油枪,将加油口内盖和外盖都拧紧关闭,最后通过语音播报提醒车主驶离。
5 结论
当今科技发展的背景下,设计这款基于ARM的加液机器人是十分有必要的,不仅可减轻加油站工作人员的工作量,还能减少一些人为事故的发生。文中分析了现如今快加油站存在的问题并研究出符合当下的加液机器人,并设计其加液机器人硬件电路系统和软件控制系统,实现了一键扫码,驱动机器人完成精准迅速的加液工作足以解决现如今存在的问题。
参考文献:
[1]陈璐. LNG加气站设计优化[D].西安石油大学,2016.
[2]陈瑞杰. 嵌入式系统发展现状概述[J]. 通信电源技术,2016,33(04):181-182.
[3]胡振国.基于ARM的嵌入式软硬件系统设计与实现[D].成都:电子科技大学.2010.
基金项目:本论文由辽宁科技大学大学生创新创业训练计划项目经费支持
编号:

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号