(华北电力试验研究院,天津市河东区,300012)
摘要:PID控制器主要针对控制对象来进行参数调节。PID的归一参数整定法和试凑法费时,费力。针对这一问题,探讨MATLAB实现PID参数整定及仿真,同时观察控制参数对PID控制规律的影响。
关键词:PID;参数整定;仿真
1 引言
PID控制器又称为PID调节器,是按偏差的比例P、积分I、微分D进行控制的调节器的简称,它主要针对控制对象来进行参数调节。因为它算法简单、稳定性好、工作可靠、鲁棒性好,在工程上易于实现,但PID控制器的参数整定方法复杂,通常采用PID归一参数法和试凑法来确定,但较费时、费力。针对这一问题,文中探讨用MATLAB实现PID参数整定及仿真的方法及控制参数对PID控制规律的影响。利用MATLAB强大的计算仿真能力,解决了利用试凑法来整定参数浩繁的工作,可以方便、快速地找到使系统达到满意性能指标的参数。
2 PID控制器的原理与算法
图1是典型PID控制系统结构图。在PID调节器作用下,对误差信号分别进行比例、积分、微分控制。

PID控制算法的模拟表达式为
μ (t) =Kp [ ![]() +
+![]() +Td de(t) dt ]
+Td de(t) dt ]
相应的传递函数为:Gc(s)= Kp(1 +![]() S + TdS)
S + TdS)
3 水箱水位调节系统:一个典型的水箱水位自动控制系统如下图所示。
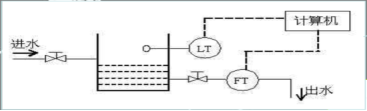
这个水位控制系统中,水池的进水量Q1来自手动控制开度的进水阀门,通过调节出水阀门调节出水量Q2,使水箱水位保持设定水位不变。这个系统是个典型单冲量自动调节系统,在该系统中:
系统中各组成单元的模型如下:
水箱对象模型:G(s)=![]() 液位传感器:量程0~40cm
液位传感器:量程0~40cm
执行阀:对应0~100%开度
系统的方框图如图所示:

4 PID控制器的MATLAB仿真
PID控制器的参数Kp、Ti、Td分别对系统性能产生不同的影响。在控制过程中如何把Kp、Ti、Td 3参数调节到最佳状态,需要深入了解PID控制中3参数对系统动态性能的影响。下面讨论水箱水位调节系统中当一个参量发生变化,对应曲线的实时变化。
4.1 P控制作用分析
根据模型中的传递函数,给出初始积分时间Ki值为0.1,当P比例作用值依次为6、5、4、3、2、1时,对应的曲线变化。为了找出最佳的P值,采用了下列MATLAB仿真程序:
close all PID=[65,0.1,0; 55,0.1,0; 45,0.1,0; 35,0.1,0; 25,0.1,0; 15,0.1,0];%初始化PID参数
for pid=1:1:6 ts=0.005; %采样时间=0.05s
sys=tf(20,[200,1]); %建立被控对象传递函数,即传递函数
dsys=c2d(sys,ts,'z'); %离散化
[num,den]=tfdata(dsys,'v'); e_1=0; %前一时刻的偏差
Ee=0; %累积偏差
u_1=0.0; %前一时刻的控制量
y_1=0; %前一时刻的输出
kp=PID(pid,1); ki=PID(pid,2); kd=PID(pid,3);
u=zeros(1,2000); time=zeros(1,2000);
for k=1:1:2000
time(k)=k*ts; %时间参数
r(k)=500; %给定量
y(k)=-1*den(2)*y_1+num(2)*u_1+num(1)*u(k);
e(k)=r(k)-y(k); %偏差
u(k)=kp*e(k)+ki*Ee+kd*(e(k)-e_1);
Ee=Ee+e(k); u_1=u(k); y_1=y(k); e_1=e(k); end
subplot(2,3,pid);
p1=plot(time,r,'-.');xlim([0,10]);hold on;
p2=plot(time,y,'--');xlim([0,10]);
title(['Kp=',num2str(kp),' Ki=',num2str(ki),' Kd= ',num2str(kd)]);
hold on;end
结果下图所示
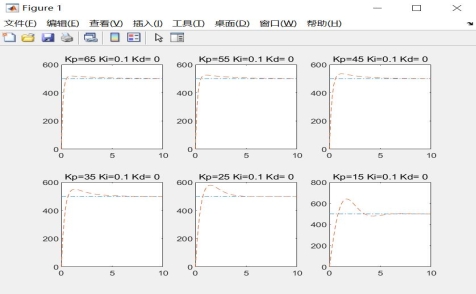
由上图可知Kp值为65时,调节效果最佳。
3.2 比例积分控制作用的分析
Kp值确定为65时,调节Ki的值依次为0.5、0.4、0.3、0.2、0.1时,观察曲线查看Ki值对PID调节的影响。程序如下:
close all PID=[65,0.5,0; 65,0.4,0; 65,0.3,0; 65,0.2,0; 65,0.1,0; 65,0,0];%初始化PID参数
for pid=1:1:6 ts=0.005; %采样时间=0.05s
sys=tf(20,[200,1]); %建立被控对象传递函数,即传递函数
dsys=c2d(sys,ts,'z'); %离散化
[num,den]=tfdata(dsys,'v'); e_1=0; %前一时刻的偏差
Ee=0; %累积偏差
u_1=0.0; %前一时刻的控制量
y_1=0; %前一时刻的输出
kp=PID(pid,1); ki=PID(pid,2); kd=PID(pid,3);
u=zeros(1,2000); time=zeros(1,2000);
for k=1:1:2000
time(k)=k*ts; %时间参数
r(k)=500; %给定量
y(k)=-1*den(2)*y_1+num(2)*u_1+num(1)*u(k);
e(k)=r(k)-y(k); %偏差
u(k)=kp*e(k)+ki*Ee+kd*(e(k)-e_1);
Ee=Ee+e(k); u_1=u(k); y_1=y(k); e_1=e(k); end
subplot(2,3,pid);
p1=plot(time,r,'-.');xlim([0,10]);hold on;
p2=plot(time,y,'--');xlim([0,10]);
title(['Kp=',num2str(kp),' Ki=',num2str(ki),' Kd= ',num2str(kd)]);
hold on;end
由运行该程序后系统的响应曲线可知,为了改善系统的动态性能,如减小超调量,缩短调节时间,水箱液位调节系统中 PID控制器的参数 Ti应选用 0.1。

结语:
1,利用MATLAB对PID参数进行整定和仿真,省去了传统方法反复修改参数,反复试运行,方便、快捷、省时、直观。
2,增大比例系数Kp将加快系统的响应,有利于减小静差,但是过大会使系统有较大的超调,使稳定性变坏;Kp取值过小,会使系统的动作缓慢。
3,增大积分时间Ti有利于减小超调,减小振荡,使系统的稳定性增加,但系统静差消除时间变长;若过小,系统的稳定误差将难以消除,导致系统不稳定。
参考文献:[ 1] 张圣勤. MATLAB7.0实用教程,机械工业出版社,2009-1.
[ 2] 薛定宇. 控制系统计算机辅助分析—Matlab语言及其应用[M]. 北京: 清华大学出版社, 1996.
[ 3] 王建国,孙灵芳,张利辉 电厂热工过程自动控制,中国电力出版社,2009-8.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



