(西南科技大学城市学院,四川省绵阳市621000)
摘要:随着我国道路不断的建设、发展。在城市道路中,慢行交通与机动化交通运行二者之间的矛盾逐步升级。在慢行交通系统中通常由步行以及非机动车交通方式组成。并且这两种交通出行方式在我国居民出行中占据相当大的比例,是城市交通模式的重要组成部分。而我国许多城市普遍存在慢行交通过街难的现象,造成信号控制设计困难,给交通安全管理工作带来挑战。且我国每年机动化交通因慢行交通过街而导致的交通停滞都会造成巨大的资源、经济浪费,同时加大了交通事故的发生频率。以典型慢行交通和机动化交通的通行矛盾为例,分析行人过街时间与汽车通行的合理时间,并提出一种基于重量感知预测行人密度的信号灯配时研究来缓解慢行交通和机动化交通之间的矛盾关系,最终以实现“智能交通,低碳运输”的目标。
关键字:重力感应单元;信号灯控制系统;信号配时;行人密度;低碳
近年来,随着城市道路不断发展,道路交通问题日趋严重,由于道路车况极其复杂,人流量大从而造成巨大的人员伤亡和财产经济损失。据我国交通部统计,2022年我国车辆在道路上因交通事故造成的直接财产损失达122801万元。其中在直行路段人行横道处,由于行人密度问题导致机动车等待行人通行时长增加,从而造成的经济损失在我国车辆在道路上因交通事故造成的直接财产损失中占据较大比例。
在慢行交通与机动化交通之间的通行矛盾与日俱增的情况下,为减少不必要的经济损失和提高道路通行能力,我国学者开始对道路交通进行研究,目前我国对道路交通的研究方向分两大类;第一类主要是基于大数据对慢行交通和机动化交通寻求进行分析,并以此为基础对交通信号灯通行时间调节。第二类则是对道路通行汽车进行研究分析,以此减少在直线路段上行人密度大但通行时间不足;行人密度小或无行人通过时,机动车辆仍然需要等待信号灯设置的固定时间,从而降低道路的使用效率和碳排放增加等问题。
根据慢行交通和机动化交通所需通行时间来看,慢行交通即行人和非机动车对过街时长的需求高,通行速度较慢,需要对其分配充足的通行时间;而机动车作为道路的主要服务对象,在满足慢行交通的通行时间后,应尽量保持机动车道通行状态,减少传统固定相位信号灯设置的等待时间,以此提升道路的使用效率和减少碳排放。但我国大多数路段的传统固定相位信号灯时间是根据不同方向的车流、行人分配通行的时间计算所得,所得的时间较为固定,无法根据通行人员做出实时调整,从而无法充分发挥道路的通行功能。
按双向四车道计算,过街横道超过15m,行人步行平均速度为V=1.2m/s,若行人想要一次性过街则需要12.5s,机动车绿灯间隔时间最少为20s,黄灯闪烁时间为3s。按上述条件,若要满足行人安全通行的最小信号相位时间为35.5s。若人行横道处无行人等待通行,而此时到达传统固定相位信号灯设置的行人通行时间,则机动车道此时变为红灯,机动车辆就会保持发动机着火状态停车等待传统信号灯所设置的行人通行时间。这必然会导致车辆长时间停滞在路段,形成交通堵塞,使得路段通行效率变低和汽车尾气中碳排放含量的增加。最终造成资源和经济的浪费。
首先,通过对现有的相关资料及文献进行学习与分析,对目前我的国道路交通现状及问题有一定程度的了解和认识。其次,通过网络搜集与我国道路通行制度相关的资料并进行一些必要的调查研究,分析出我国道路交通问题现状。其次通过研究收集到的所有资料,查找出现阶段我国慢行交通和机动化交通所存在的问题。最后,结合我国现阶段的实际情况提出改善道路慢行交通和机动化交通问题的一些观点和建议。
改善措施分为三大部份:第一,取消传统的,固定的交通信号相位时间。采用灵活的交通信号相位时间代替。当行人和非机动车需通过人行横道时,在待行区等候时,通过重力感应单元向信号灯控制系统发送过街需求,当信号灯系统接受到需求信号后将对交通指示灯进行变更。(如图1所示)在满足行人正常过街需求的同时减少汽车的不必要的等待时间。第二,通过重力感应单元检测到的重量信息推测出待通行的行人数量后,将数据传递给信号控制系统使其做出信号灯时间调整,“待需通行人数越多,所需等待时间越短”。第三是,将传统的一条过街横道增加为两条。由一条过街横道的来往相互通行变为两条过街横道的单向通行,减少因过街横道上相互通行而造成的通行混乱的情况。(如图2所示)

图1人行横道横断面图
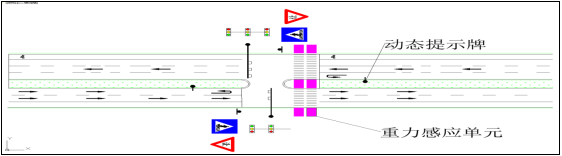 图2人行横道俯视图
图2人行横道俯视图
概念:本装置是一款基于行人重量,根据数据规范推测出行人数量。并基于所测行人数量,并以此控制红绿灯交通信号相位时间。(如图3所示)

图3重力检测单元示意图
思路:每位行人身上都具有相对应的自然属性,自然属性是人所固定具有的,无法轻易改变或变换,可以减少研究中的偶然性,我们从自然属性中提取行人的体重作为基础以此进行研究。该研究思路来源于高速路路口处的货车的过磅称重系统,在高速路口,货车通过重力感应单元就将被采集轴重,货重等信息,货车的信息被采集后上传至高速路的系统中,并以此作为收费的凭据。由此我们的思路是,在路边设置一个小型的重力感应单元,当行人想要通过横行道时,将通过小型重力感应单元,小型重力感应单元收集到重量数据并分析出待通行人数,并传递到交通信号控制系统当中,然后经过交通数据分析,对所需的时间做出一个调整,再发出信号。(如图4所示)
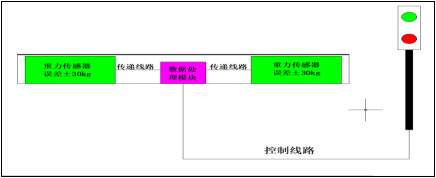
图4重力检测系统示意图
首先由离路段50m处的动态提示牌提示驾驶司机前方道路路况,然后改变路段处红绿灯,使行人能够安全,高效的通过人行横道,当行人通过后。将由另一侧的重力感应单元收集信息,将数据传输到信号灯控制系统中,由信号灯控制系统根据开始过街时行人的总重量为基础,对完成过街人员重量进行核对。若与开始过街时行人总重一致,则恢复交通;若缺少,则在机动车道继续发出红灯信号。待所有行人通行完毕,系统核对完整之后恢复机动车道交通,并以此作为一个闭环。若无行人通过则该车道信号灯在不影响其他相位车辆行驶情况下,保持通行绿灯状态。(如图2所示)此系统在满足行人通行需求的同时,还可收集该路段行人的通行需求,为城市交通建设提供数据依据。
以行人所需等待通行基础时间为180s。我国人口平均重量为62kg参考。
待通行人数与等待时间公式如下:
(1-1)
| 式中:T—等待时间(单位:秒); y—可缩短时间(单位:秒); x—行人重量(单位:千克); |
待通行人数计算公式如下:
(1-2)
ROUNDUP( | 式中:R—待通行人数,R为正整数(单位:位); x—行人重量(单位:千克); |
结论
本系统基于重力感应单元的感知下预测行人密度。在行人密度大情况下能有效调整信号灯相位时间,保证行人安全有充足的时间通过人行横道。避免了传统相位信号灯中通行时间少且固定,行人等待通行时间长等问题;在无行人过街情况下,减少传统固定相位信号灯设置的等待时间,所造成的时间、经济和资源损失。该套系统在实际运用中将提高交通通行效率,减轻交通冲突问题,实现数智交通,低碳运输的目标。
基金项目:2022年度四川省级大学生创新创业训练计划项目。
编号:S200014045043。
参考文献
[1]唐国茹,杨军,郭华.无人值守地磅自动称重系统在某矿山的应用[J].现代矿业,2021,37(4):147-148+151.
[2]曾敏丹.城市道路行人与非机动车分道通行优化设计探索[J].山西建筑,2022,48(6):133-135+143.
[3]李克平,刘建华.交叉口行人过街长度与信号控制问题分析[J].道路交通管理,2022(3):20-21.
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号