130224197805216216
摘要:液力自动变速器采用行星齿轮结构,通过不同的构架获得不同的速比。行星齿轮机构的传动比的优化关系到传动系统的效率,并且决定了开发的难度以及成本的投入。本文通过某8AT对速比计算方法进行说明。
关键词:液力自动变速器 行星齿轮系 等效杠杆法 速比计算
一 引言
自动变速器在未来的几年里还将会保持相当大的市场占有率,其中最成熟,使用最为广泛的是液力自动变速器(AT)。AT采用了行星齿轮机构,从挡位来说已经由最初的4挡到目前的8挡、9挡甚至是10挡。随着档位的不断增加,行星排的数量以及连接方式都会改变,作为最基础的,速比的计算是很关键的。本文针对市场上某款8AT通过等效杠杆法进行速比的计算。
二 等效杠杆法的说明
(1) 行星排的构成:
行星排由太阳轮、行星轮、齿圈和行星架通过一定的关系组合在一起。
(2) 行星排的种类:
按排数不同可分为单排和双排行星齿轮系;按行星齿轮组数的不同可分为单级和双级行星排;

图1单排单级行星系 单排双级行星系
(3) 速比获得的方法
在行星系计算中有一个转速特性关系式:
单级:ns+KnR-(1+K)npc=0 (1)
双级:ns-KnR+(1-K)npc=0 (2)
以上K=ZR/Zs行星排特性参数
ns太阳轮转速ZS 太阳轮齿数
nR 齿圈转速 ZR 齿圈齿数
npc行星轮转速
由式(1)(2)可知,固定任何一个元件,指定输入输出,都能得到输入与输出的比值,即速比。比如单级行星排固定行星架,即npc=0,太阳轮输入,齿圈输出,便能得到速比值为:ns/nR=-K;
K为固定正值,“-”代表方向相反,此时档位为倒挡。为了直观通常把行星排通过传动简图形式表现出来:

图2 传动简图
通过转速特性关系式可得到不同的输入、输出及制动状态下的速比,



 图3 (a) (b) (c)
图3 (a) (b) (c)


(d) (e) (f)
速比如下表:
a | b | c | d | e | f | |
太阳轮 | 输入 | 固定 | 输出 | 固定 | 输入 | 输出 |
行星架 | 输出 | 输出 | 输入 | 输入 | 固定 | 固定 |
齿圈 | 固定 | 输入 | 固定 | 输出 | 输出 | 输入 |
速比 | 1+K | (1+K)/K | 1/(K+1) | K/(K+1) | -K | -1/K |
增减速 | 减速 | 减速 | 增速 | 增速 | 减速 | 增速 |
(4)等效杠杆
杠杆法是将行星排等效为一根三(多)
点的杠杆,通过比例关系计算速比;
单级排的等效杠杆:



图4 a结构图 b简化图 c等效杠杆图
双级排的等效杠杆:



图5 a结构图 b简化图 c等效杠杆图
(5)计算速比
前文通过特性公式计算了一种形式的速比,即单级单排固定行星架,太阳轮输入,齿圈为输出。

![]()
![]()
![]()
图6 单级单排行星排速比计算
上图,通过三角关系,得到:
速比=n入/n出=K/1=K
方向与输入方向相反为倒挡。与通过特性公
式计算的结果相同。
(6)单级双排的等效杠杆
分别将前排和后排等效为三支点的两个
杠杆,然后根据结合关系将节点连接并合并,
得到一个四支点单排杠杆。下图中前排K1和
后排K2都是单级排,K1行星架与K2齿圈连
接,K1齿圈与K2行星架连接。K1太阳轮为
 输入,K2行星架输出,K2太阳轮制动。
输入,K2行星架输出,K2太阳轮制动。
图7 行星排简图
 等效杠杆:
等效杠杆:

![]()
图8 杠杆图
(7)典型行星排的等效杠杆
目前市场上很多行星系都是在辛普森
式行星排和拉维娜式行星排基础上构型的。


图9 a辛普森 b拉维娜
 辛普森行星排等效杠杆如下图:
辛普森行星排等效杠杆如下图:

![]()
图10辛普森行星排杠杆图
 拉维娜行星排等效杠杆如下图:
拉维娜行星排等效杠杆如下图:

![]()
图11 拉维娜行星排杠杆图
三 多档AT速比的计算
 现以一款8AT为例介绍速比的计算方法
现以一款8AT为例介绍速比的计算方法
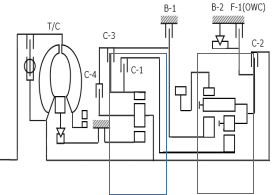
图12 结构剖视图
(1)结构分析

图13示意图
 将上图简化成如下图:
将上图简化成如下图:
前排 后排
图14 结构简图
可知产品有四个离合器C1-C4,两个制动器B1,B2,单向离合器F-1及两个行星排组成。前排为单排双级、后排为前文介绍的拉维娜式行星排。整个机构输入为前排行星架,输出为后排的齿圈。
(2)速比计算
计算时把前排作为固定速比,根据不同结合状态与后行星排速比相乘。
 ①对行星排进行杠杆简化
①对行星排进行杠杆简化
![]()
![]()
图15 简化杠杆图
② 各元件功能及动力流向

图16 动力流向图
分析其结构,前太阳轮固定,前排行星架输入,后排齿圈输出。C1连接前齿圈和拉维娜后排太阳轮,C2连接前行星架和拉维娜行星架,C3连接前齿圈和拉维娜前排太阳轮,C4连接前行星架和拉维前太阳轮。B1固定拉维娜前太阳轮,B2和F-1连接拉维娜行星架。通过以上可得:

图17 简化杠杆图
③ 用直线连接各元件,得到与输出轴的交点
![]()

图18 元件连接图
上图可得到输出轴上10个交点,基准横轴上8个,轴下2个,考虑倒挡速比的大小,舍弃纵轴最下端的一点。这种结构是8个前进档,1个倒档。档位使用的元件如下:
档位 | C1 | C2 | C3 | C4 | F1 | B1 | B2 |
一 | ⚪ | ⚪ | ⚪ | ||||
二 | ⚪ | ⚪ | |||||
三 | ⚪ | ⚪ | |||||
四 | ⚪ | ⚪ | |||||
五 | ⚪ | ⚪ | |||||
六 | ⚪ | ⚪ | |||||
七 | ⚪ | ⚪ | |||||
八 | ⚪ | ⚪ | |||||
Rev | ⚪ | ⚪ |
 ④速比计算
④速比计算
图19 速比图
上图以一档为例进行速比的计算:
已知K1=82/38;K2=74/34;K3=74/30,
假设nin=1,nout为一档转速
首先计算前排减速比:
nout/nin=LS1-R1/LS1-PC1
即nout/nin=(K1-1)/KI,
则:nout=(K1-1)/K1 (3)
然后计算后排速比,通过三角关系得:
n1/nout=1/K3,那么n1=1/K3×nout(4)
(3)(4)可得:
n1=1/K3×(K1-1)/K1 (5)
那么i1=K1K3/(K1-1) (6)
将K1,K3值带入(6)中可得一档速比i1=4.596
同样方法计算出其他档位速比:
转速 | 速比 | |
n2 | (K2+1)(K1-1)/(K1*(K2+K3)) | 2.724 |
n3 | 1-1/K1 | 1.864 |
n4 | (K3-1)/((K2+K3)K1)+(K1-1)/K1 | 1.464 |
n5 | (K3-1)/(K3K1)+(K1-1)/K1 | 1.231 |
n6 | 1 | 1.000 |
n7 | (1+K2)/K1K2+(K1-1)/K1 | 0.824 |
n8 | (1+K2)/K2 | 0.685 |
nRev | (K1-1)(K2+1)/(K1K2)-(1-1/K1) | 4.056 |
以上转速可用excel计算得出。
四 结束语
(1) 采用等效杠杆法对8AT速比进行计算,
结果与产品说明上的速比信息吻合;
(2) 在使用杠杆法时,行星排简化,动力流
向分析尤为重要,一定要仔细确认,不然
很容易出现错误的结果。
(3) 本文更详细的说明了杠杆法的使用方法,更适合初学者进行参考。
以上,本文参考了一些前辈的著作和论文,在此特别感谢。
参考文献:
[1]高惠民. 杠杆法分析皇冠8速自动变速
器传动比. 汽车维修与保养.2018.3
[2]于杰、马朝锋、郭奶超、刘凯.基于杠杆
法的4行星排传动方案综合. 机械传
动.2019.5
[3]张鹏飞.基于杠杆法的拉维纳式变速器传
动方案分析.汽车零部件.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号