1.西安市轨道交通集团有限公司运营分公司, 陕西 西安 710016
2.四川众合智控科技有限公司, 四川成都 610081
摘要:城市轨道交通突发事件应急管理是城市轨道交通安全、可靠运营的基础和前提。由于城市轨道交通本身的速度高、密度大、设施设备量大且技术复杂,近几年运营事故等突发事件时有发生并具有其特点。因此分析典型事故案例、剖析故障原因,显得尤为重要。文章从电客车产生FSB,TOD显示制动实施状态故障出发,详细分析了硬件监测、软件算法核对等层面的技术研究。
关键词:电客车;全常用制动;软件算法核对
引言
西安市地铁六号线电客车运行过程中多次在同一区域产生FSB(全常用制动),本文主要采用理论研究法、现场测试法、比较分析法等研究方法,着重分析了电客车车载信号软件设计、硬件配置的现状,并制定了相应的优化措施,提出了改善城市轨道交通运输中电客车车载信号运行水平的建议和意见。
1.西安市地铁六号线电客车运行过程产生FSB故障概况
西安市地铁六号线列车运行过程中多次在甘家寨站下行进站前产生FSB,TOD显示制动实施状态故障。通过对故障数据的分析对比,发现故障列车在甘家寨下行进站时均出现有Lib-A加速度超过5000mm/s/s的情况(当Lib加速度大于5000mm/s/s时,系统判定为打滑)。
2.电客车车载软件算法核对
通过对速度传感器采集的脉冲频率进行Lib-A加速度手动计算,计算公式如下:
原始速度=脉冲频率*脉冲距/1000
Lib-A加速度=(原始速度A-原始速度B)*1000/150
手动计算的Lib-A加速度和CC计算的加速度相同。
3.电客车车载软件打滑状态判断及退出机制
当OPG测得的制动率(Lib-A加速度)大于5000mm/s/s时,判定为列车进入打滑状态。若列车需要退出打滑状态,需要两个速传和雷达采集的数据任意两两之间都必须相交叉,故会造成ATO判定打滑4s(能接受的打滑状态最大持续时间)。 通过数据观察,目前ATO进入打滑状态后,无法退出打滑原因是两个速传和雷达无交叉。
4.不同场景下的数据对比
针对统计多车在甘家寨下行进站的Lib-A加速度变化情况、统计一个车多次在甘家寨下行进站的Lib-A加速度变化情况、统计故障车在全线其他站的Lib-A加速度变化情况、统计其他车在全线其他站的Lib-A加速变化情况四个场景,进行了大量数据对比。通过数据对比发现多车通过甘家寨下行进站处的数据,Lib-A加速度情况如下图所示,多次出现了Lib-A加速度异常波动(下图标红处)但未到达5000的阈值,造成异常现象的原因可能是a.车轮打滑 b.速传受到外界干扰 c.运行过程中出现大制动。

现场对轨旁环境进行勘察发现在甘家寨站下行进站前,存在大量无线设备,如下图所示。当速度传感器受到外界电磁干扰,会出现波形异常,导致系统判断为打滑产生FSB。
5.现场排查及测试情况
5.1静态检查
检查速度传感器轴端盖安装、出线方向、安装间隙和连接器内部插针接触情况,未发现异常;检查车底线缆走线及屏蔽情况,未发现异常
5.2动态检查
重载端子侧:将示波器表笔接入到速度传感器至CC机柜的连接线缆上,观察示波器波形。动车过程中,全程用4通道示波器监视通道间相位差及输出波形,确认波形输出是否正常及其他情况。当有速度传感器信号发生异常时,可通过示波器观察速度信号的波形。正常情况下连续输出方波信号,如下图所示:

根据异常波形确定干扰现象及原因,由于速度传感器脉冲信号受干扰频率低,正常情况下可能无法检测到异常波形。在科技路站至甘家寨站下行进行6次AM-C运行测试,当列车速度为65-70km/h时,波形输出正常,四个通道采集的信号均为连续性方波,未发现异常(有干扰时波形会异常凸起,且方波数量会增多)。
CC侧数据分析:通过对应CC数据分析,在速度为65km处出现了加速度异常波动。

5.3第一次测试内容
以“脉宽的变化”的方式设置四踪示波器,以“高电平上的干扰”的方式设置另一台示波器进行测试;如果测试过程中捕捉到了干扰(存储波形),则再进行两次试验;如果没有捕捉到干扰,则两台示波器均以“高电平上的干扰”方式设置示波器,同时把触发电平由18V适当下调到17V左右,再进行几次测试;试验过程中对示波器屏幕全程录像。两台示波器均以“高电平上的干扰”方式设置示波器,把触发电平由18V下调到12V左右,进行几次测试(存储波形);试验过程中对示波器屏幕全程录像。
5.4第一次测试方法
一台四踪示波器接CH1、CH2、CH3、CH4的信号输出,另一台二/四踪示波器接电源线/CH1和CH3的信号输出,记录器接CH1、CH2、CH3、CH4的信号输出。
5.5测试情况及车载控制器数据分析
查看CC数据,仍发现Lib-A加速度多次异常波动,手动计算的Lib-A加速度与CC计算的加速度相同,CC数据显示异常波动原因为速传传感器A脉冲频率突增。


5.6速度传感器侧分析
静态安装检查:速度传感器外观、连接器、护套走线和完全半径符合安装要求;动态检查:升弓后检查VOBC给速度传感器供电电压波动,电压有噪音干扰。示波器触发捕捉干扰信号,在测试期间没有捕捉到干扰信号。
5.7常规波形记录
速度传感器内部通道(CH)1和(CH)2、通道(CH)3和(CH)4共用电源,通道(CH)1脉冲下降沿过冲时拉低通道(CH)2高电平,同时通道(CH)3和(CH)4也有相同的情况。如下图所示。


5.8本次测试结论
区间内常规波形记录所示,当电缆及屏蔽受外界辐射干扰时,单组供电电源内其中一个通道下降沿过冲电平,影响另外的通道电平输出。
5.9第二次测试DF16波形
接线:将DF16的四个通道的信号输出分别接到TBS1104的四个输入探头:CH1接第一踪探头,CH2接第二踪探头,CH3接第三踪探头,CH4接第四踪探头,第一/二通道的15V电源负接第一/二踪示波器探头的地,第三/四通道的15V电源负接第三/四踪示波器探头的地。将DF16的第一通道输出信号CH1再接TBS1102的第一踪探头,将第一/二通道的15V电源正接TBS1102的第二踪探头,第一/二通道的15V电源负接第一/二踪示波器探头的地。
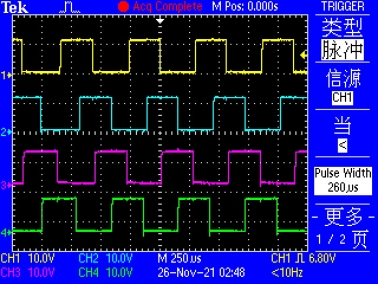
脉宽设定捕捉:将两台示波器的触发类型设定为小于一定值的脉宽触发,触发信源为第一踪,极性为正,触发方式为单次触发,脉冲宽度分别为230us和200us时进行了测试,两台示波器均未被触发;脉冲宽度分别调整为240us和220us时进行了测试,两台示波器均未被触发;脉冲宽度分别调整为260us、263us、265us等时进行了测试,两台示波器均多次被触发;在第三次测试中,曾捕捉到240us被触发。
根据上图,经测算周期T1=585us,T2=560us,T3=555us,则三个相邻周期对应的瞬时速度值分别为:
V1=频率*脉冲距=(1/585*13227*3600/1000)=81.4km/h,
V2=(1/560*13227*3600/1000)=85.0km/h,
V3=(1/555*13227*3600/1000)=85.8km/h
由V1、V2、V3的数值可以看出,它们均超出了最大允许速度80km/h,且其最大速度差达到了4.4km/h,而列车的实际速度是78km/h左右,如果以瞬时速度作为超限的判断标准,则会触发FSB。由上图也可以看出,波形有明显的电磁干扰痕迹。
5.10波形录像情况


科技路站—甘家寨站下行 甘家寨站-科技路站下行
现场测试时背景声音及测试记录图像可以明显的听/看出,列车在65 km/h~78km/h运行时,示波器上速传的波形明显左右摆动,摆动的越剧烈,背景噪声也越刺耳,波形的左右摆动也就是相应的频率在发生变化,也就意味着相应的瞬时速度在发生跳变。
5.11故障区域扫频测试
使用频谱仪扫频显示甘家寨区间存在有信号系统LTE无线信号、民用通信系统无线信号,并且通过跟车测试表明列车在运行过程中,这些无线系统的信号强度均在-20dBm至-60dBm之间,表现正常。除此之外,未发现有其他未知的无线频段的信号。
5.12电客车车载控制器数据分析
通过CC数据分析,发现列车在速度为65km/h左右出现了加速度异常波动。
6.轨道线路状况
线路情况:科技路到甘家寨方向是弯道-上坡,其曲线半径是3000m,再是23‰的上坡(直道),发生故障时都在坡底,详见下图。
轨道情况:经轨道专业人员对甘家寨站下行进站前500m区域进行轨道情况查看,轨道几何尺寸正常,均在作业验收(-1 2)范围内,无异常。
7.故障原因分析
从测试波形分析及列车上实际感受,列车在甘家寨下行进站前可能存在蛇形运动,导致列车两侧的速传输出的频率不同,理论上在直道或大弯曲半径的弯道上运行时,存在走行部呈蛇形运动状态的情况,车轮的踏面在钢轨轨面上左右滑动,车轮在左右滑动时,车轮轮缘会撞击钢轨内侧,随着车速的增加,这种撞击及滑动愈发剧烈,安装在轴端的速传波形的频率也可能随着撞击及滑动而发生比较剧烈地变化。另外,从波形数据分析在高、低电平上存在杂波干扰情况(列车蛇形运动或者外部电磁干扰),在上升沿、下降沿有都有较大的过冲,速传会将杂波判断为速传脉冲,从而导致速传脉冲激增,加速度突变。(注:机车蛇行运动是指机车在直线上高速运行时可能会出现的一种横向振动。由于车轮踏面呈锥形,且轮缘与钢轨间存在间隙,当轮对中心在行进中偶尔偏离直线轨道的中心时,两车轮便以不同直径的滚动圆在钢轨上滚动,轮对一面作横向摆动,一面绕其质心的垂直轴来回转动,而产生一种类似蛇行的波形运动。)
综上,在列车蛇形运行或电磁干扰的作用下,加速度值大于信号系统所设定的阈值,列车的名义速度(根据轴端速传计算得来)表现出轮轴空转的假象,造成在甘家寨进站前的FSB问题。
8.车载软件层面优化措施
列车因电磁干扰或列车蛇形运动影响,OPG加速度率单周期大于阈值(5000mm/s/s),导致列车进入打滑状态,后续未满足两个速传和雷达采集的数据任意两两之间都必须相交叉的条件,导致列车无法退出打滑状态。经讨论和故障数据分析,修改ATO打滑判定机制及退出机制两方面进行优化,规避因电磁干扰或列车蛇形运动导致的打滑问题。
8.1 ATO打滑判定机制
修改前:打滑判定加速度,单周期当OPG测得的制动率大于此值(5000mm/s/s)时,判定为列车产生打滑。
修改后:打滑判定加速度,若持续3周期当OPG测得的制动率大于此值(5000mm/s/s)时,判定为列车产生打滑
8.2 ATO打滑退出机制
修改前:两个速传和雷达,任意两两之间都必须相交叉。
修改后:两个OPG测速有交叉,且列车恢复正常的加/减速度范围即可退出打滑。
![]()
9.车载硬件层面优化措施
当前所使用的速度传感器输出高电平电压值10V左右,受外界干扰时高电平输出异常噪音,当异常高电平低于测速测距板卡设置的门槛电压时,容易造成速度传感器内部光电模块多计脉冲数,当速度传感器内部4个光电模块在一定时间内脉冲数值差超过测速测距板卡容忍阈值时,信号系统会“打滑”报警。依据现场区间内异常干扰情况选择另外一种光电模块进行测试,速度传感器输出高电平电压值为13V,受外界干扰时无异常噪音。更换速度传感器内部光电模块可避免干扰导致的脉冲突变问题。
结束语
综上所述,电客车在城市轨道交通运输中至关重要,车载控制器软、硬件重要性也比较突出,需要切实保证电客车车载软件的可靠性和适用性。针对电客车车载信号在硬件配置、软件设计等各关键环节要精益求精,做好每一次异常车载数据分析排查,要求明确所有干扰因素和技术要点,旨在提高电客车运行水平的稳定性,确保城市轨道交通安全运营,为我国城市轨道交通可持续发展提供保障。
参考文献:
[1]城市轨道交通CBTC信号系统行业技术规范-产品规范

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



