珠海云洲智能科技股份有限公司 广东珠海 519000
摘要:无人艇操纵灵活、机动性强、可远程遥控,在很多方面都有着广泛的应用。但水动力相关研究十分重要却比较少。因此随着航速不同,建立同一艘无人艇在不同航行状态下的水动力模型,并研究在此模型下无人艇的运动特性成为一个难点,也是研究真实无人艇的一个关键环节。
关键词:无人艇水;动力;应用
引言
随着科学进步的发展,人们对海洋的探测进入了新的世纪。中国也出台了众多政策鼓励海洋科技的发展,在新一轮的海洋战略中占领高地。发展海洋科技必然少不了对海洋的探测,现阶段载人船舶为主要海洋探测力量。然而载人船舶大多吨位大,操作复杂,巨大的成本更是阻碍了探测的脚步。而在一些小型河流湖泊中更是面临着大船进不去,小船无法搭载设备、安全性差等问题。基于当前环境,合适船型的海洋探测无人艇需求量剧增。
1 船型特征介绍
新型高速无人艇船型采用单体穿浪半滑行式设计,主要的船型特点如下:
(1)主船体采用细长、多折角深 V 型、半滑行式设计。主船体采用多折角深 V 型设计来兼顾船体装载能力、快速性和耐波性;采用半滑行式细长体设计兼顾无人艇在低速和高速时的性能,这是因为无人艇不会一直在高速状态航行,中低速巡航是常态。细长内倾式设计可使艇体轻易地冲开前方的障碍物群。同时该船体更容易向大型化发展。
(2)船艏采用内倾式穿浪型设计。采用内倾式穿浪型船艏来减小波浪对船艏的扰动,减小船体在波浪中的运动幅值和加速度。
(3)采用了内倾型船艏配合全封闭的上层建筑设计,降低船体可探测性,具有良好的隐身能力。
(4)改进后的无人艇船型采用压浪干舷设计,引入翼身融合的概念,可以在不改变水线以下船体的基础上增加舱容和储备浮力,提高细长快艇的动稳性、安全性和机动性。图 1 展示了两艘无人艇验证模型,模型的主尺度见表 1。无人艇Ⅰ为初始概念设计验证模型,无人艇Ⅱ在无人艇Ⅰ的基础上进行了改进。这两个无人艇模型具有相同的水线以下主船体,主要区别在于:无人艇Ⅰ在船艏水线附近安装了压浪条;无人艇Ⅱ安装了可拆卸的艏部压浪条,并采用了压浪干舷设计,即原有干舷在水线附近向外折出,形成折角式设计,干舷折角线连接艏艉柱,如图 1(b)所示。船艏压浪条和压浪干舷设计的主要用途为控制高速航行时的船体表面淹湿面积,减小船体阻力。无人艇Ⅱ的艏部防溅条由于位置靠前且较短,在高速时不能发挥作用,后被拆除。
表 1 无人艇模型主尺度


(a)无人艇Ⅰ (b)无人艇Ⅱ
图 1 无人艇模型、船体轮廓和剖面
通过使用惯性导航传感器等进行了船体横倾试验,测得无人艇Ⅰ自航模在典型装载情况下的初稳性高为 55.6mm,根据初稳性高可反推和调整无人艇自航模重心高度。
2.高速艇艇型优化
本文结合兴波阻力理论与非线性规划方法,将某些控制艇型优化,使其满足实用要求的目标函数。优化时保持艇体的长、宽、吃水等主尺度不变,排水量大致相近,用艇型优化方法产生待选优型USV3 等(表1 ),然后计算、比较它们的阻力性能,见图1 ,初步选出艇型US3C UV3C 。
表1艇型参数

图2 兴波阻力系数曲线
3 无人艇机动性相关水动力研究
3.1 无人艇Ⅰ低速回转甩尾现象研究
在进行无人艇Ⅰ的 Z 形操纵性试验时发现无人艇回转换向时艏部回转位移小于艉部回转位移,回转中心靠近船艏,出现甩尾的航行特点。快速地甩尾增加了船艏回转速率的变化,加快船体回转,该现象对改善细长体船型的回转性能有益。作者猜测甩尾是由于无人艇船型特殊的近似于柴刀的中纵剖面形状造成的。由图2可知,无人艇艏部吃水较深,同时艉部有一定的抬升,艏部中纵剖面投影大于艉部投影。这使得无人艇回转时水动力作用点在艏部。为了验证这一猜测,基于 CFD 对无人艇Ⅰ低速回转时的甩尾现象及原理进行了探究。为了简化问题,研究采用来流绕射船体的方法。计算域如图 2(a)所示。将来流方向垂直于船体,流速设为 1.3m/s。通过后处理获得自由面等高云图和船体表面入流侧和去流侧的压力云图,如图 2(b)和 2(c)所示。观察自由面等高云图可以发现在船艏处入流端发生了堵水而在去流端形成了空穴,从而水流能够比较轻易地流过船尾,这意味着艏部对来流的阻塞作用很大。观察船体表面入流侧和去流侧压力云图可知入流侧船艏压力明显大于艉部压力。经过计算可知压力中心在艏部,位置距船尾 1.851m(0.684 倍水线长)。因此无人艇Ⅰ回转时水动力作用点靠近船艏,由此引发了低速回转时的甩尾现象。
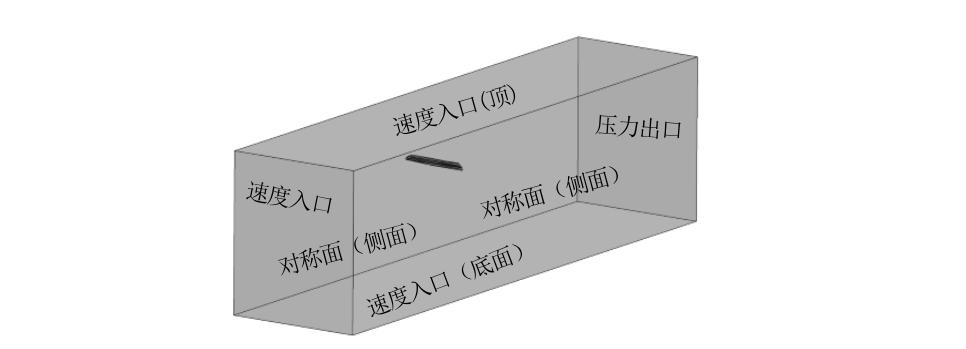
(a)计算域设置

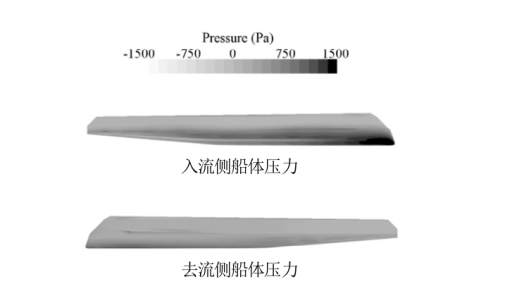
(b)自由面等高云图 (c)船体表面入流侧和去流侧压力云图
图 2 基于 CFD 的无人艇Ⅰ的甩尾现象研究
3.2载体设计技术
(1)总体采用模块化设计和开放式体系结构,降低研发成本,兼具执行多种任务的能力。
模块化设计和开放式体系是分别设计系统的不同组件,将系统细分为较小的部分的方法,这些部分可以独立搭建,然后在不同的系统中用于执行多个功能。目前,各国开发的无人艇几乎都采用了模块化设计和开放式体系架构。可根据不同的作战任务进行不同的功能组合。整个设计是高度模块化的,可以根据所需任务、有效负载或环境条件来替换或修改每个模块。例如美军研发的斯巴达侦察兵号无人艇,技术成熟的模块囊括了监视和侦察、反舰作战、排除水雷、反潜、目标打击等模块,可在一个小时内利用“即插即用”型任务模块完成一艘基本版斯巴达侦察兵无人艇装配。模块化设计和开放式体系结构提高了无人艇研发进度和功能的多样性,同时有效降低了科研成本。
(2)任务驱动的高性能、新概念艇型设计层出不穷,无人艇的载体性能得到显著提升,并演变出更多新功能。
当前无人艇的载体构型,仍以滑行、排水、多体、水翼、半潜等五类艇型为主。但是随着军民领域对高性能的不断追求,对新需求、工作域的逐渐扩展,导致常规无人艇型,已较难满足或适应高性能、新任务对载体的苛刻需求。比如,研究可变结构、多航态的载体,提升隐蔽性或高海况生存能力;研制具备海陆两栖航行能力的复合型载体,以应对岛礁、濒海任务需要;探索具备水下、水面、空中跨域适应性的新型航行器,以适应隐蔽潜行、快速突防的需要;研究具备高海况甚至全海况安全航行、超长航时续航能力的大型/多体载体,以执行反潜、有人/无人协同作战等使命。总之,推动无人艇工作空间从单域向多域、跨域发展,工作时间从局部短期向广域长航时发展,环境耐受性从低海况向高海况发展,将是一个发展趋势。
4.结束语
无人艇Ⅱ将无人艇Ⅰ的艏部压浪修改为干舷压浪,减小了无人艇在高速下的船体阻力的同时提高了无人艇在高速回转时的横倾回复力矩,证明了干舷压浪的改装有效。在已有研究的基础上,将进一步优化高速无人艇单体船型,并在单体船型的基础上开发高速三体无人艇船型。
参考文献:
[1] 徐玉如, 苏玉民, 庞永杰. 海洋空间智能无人运载器技术发展展望[J]. 中国舰船研究, 2006, 15(3):2-4.
[2] 万接喜. 外军无人水面艇发展现状与趋势[J]. 国防科技, 2014, 35(5): 91-96.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



