中国能源建设集团安徽电力建设第一工程有限公司,安徽 合肥 230088
摘要:针对技术要求高、施工难度大、网架滑移碰撞冲突等问题,利用Revit软件建立空间网架三维可视化模型进行施工过程模拟。应用BIM技术,对施工方案进行模拟,做到空间指导施工,可视化技术交底,避免了返工和施工错误的产生,缩短了工期,节约了成本。
关键词:BIM技术;钢结构网架;网架滑移;施工工艺
该网架面积为1860.3平方米,屋面采用焊接球节点正放四角锥钢网架,下弦支撑,柱子采用格构柱,网架平面尺寸为39mx47.7m,网架顶标高为27.40m。
2 施工工艺技术
2.1网架单元的地面安装
利用吊装小拼单元的方法直接在设计位置的就近位置进行地面散装,用垂线和钢尺控制将该单元各节点的位置基本接近设计位置。地面拼装基本流程:连接下弦杆→将已拼装成的上弦球及腹杆三角锥连接到下弦层→连接第二网格上弦杆及腹杆→将两网格安装成基本单元→扩大基本单元→安装腹杆→拼装成较稳固基本单元→扩大基本单元→继续扩大基本单元→拼装成稳定受力单元
2.2网架滑移
滑移流程如下所示:
第一步:设置高空拼装平台作为结构拼装区域,在24.4m层钢梁上铺设两条通长平行轨道,并将每条轨道上放置2个爬行器。
第二步:利用起吊机械将在地面组装好的网架单元起吊至预先放置好的爬行器上。
第三步:连接调试后,利用爬行器向前滑移出一榀桁架的距离,然后将结构在胎架上临时固定。
第四步:再利用起吊机械起吊下一榀网架单元;
第五步:将两榀网架单元进行连接;
第六步:利用爬行器将两榀网架单元向前滑移一榀桁架的距离;
第七步:重复上述步骤将网架整体滑移至设计位置;
第八步:滑移至设计位置后,利用千斤顶将结构抬起,拆除滑靴下方轨道,将支座降至设计埋件上,拆除临时措施,滑移完成。
1、主要技术
(1)液压同步滑移
“液压同步滑移技术”采用液压爬行器作为滑移驱动设备。液压爬行器为组合式结构,一端以楔型夹块与滑移轨道连接,另一端以铰接点形式与滑移构件连接,中间利用液压油缸驱动爬行。
液压爬行器的楔型夹块具有单向自锁作用。当油缸伸出时,楔型夹块工作(夹紧),自动锁紧滑移轨道;油缸缩回时,夹块不工作(松开),与油缸同方向移动。
步骤1:爬行器夹紧装置中楔块与滑移轨道夹紧,爬行器液压缸前端活塞杆销轴与滑移构件(或滑靴)连接。爬行器液压缸伸缸,推动滑移构件向前滑移;
步骤2:爬行器液压缸伸缸一个行程,构件向前滑移300mm;
步骤3:一个行程伸缸完毕,滑移构件不动,爬行器液压缸缩缸,使夹紧装置中楔块与滑移轨道松开,并拖动夹紧装置向前滑移;
步骤4:爬行器一个行程缩缸完毕,拖动夹紧装置向前滑移300mm。一个爬行推进行程完毕,再次执行步骤1工序。如此往复使构件滑移至最终位置。
(2)计算机同步控制技术
液压同步滑移施工技术采用计算机控制,通过数据反馈和控制指令传递,可全自动实现一定的同步动作、负载均衡、姿态矫正、应力控制、操作闭锁、过程显示和故障报警等多种功能。
2、主要设备
(1)自锁型液压爬行器
自锁型液压爬行器是一种能自动夹紧轨道形成反力,从而实现推移的设备。此设备可抛弃反力架,省去了反力点的加固问题,省时省力,且由于与被移构件刚性连接,同步控制较易实现,就位精度高。
(2)液压泵源系统
液压泵源系统为爬行器提供液压动力,在各种液压阀的控制下完成相应动作。在不同的工程使用中,由于顶推点的布置和爬行器的安排都不尽相同,为了提高液压提升设备的通用性和可靠性,泵源液压系统的设计采用了模块化结构。根据顶推点的布置以及爬行器数量确定泵源的流量,可进行多个模块的组合,每一套模块以一套泵源系统为核心,可独立控制一组液压爬行器,同时可进行多顶推点扩展,以满足实际顶推滑移工程的需要。
(3)同步控制系统
液压同步顶推施工技术采用行程及位移传感监测和计算机控制,通过数据反馈和控制指令传递,可全自动实现一定的同步动作、负载均衡、姿态矫正、应力控制、操作闭锁、过程显示和故障报警等多种功能。同步控制系统由动力控制系统、功率驱动系统、计算机控制系统等组成。主要完成以下两个控制功能:
1)集群爬行器作业时的动作协调控制。滑移工作中,每台爬行器都必须在计算机的控制下协调动作,为同步滑移创造条件。
2)各点之间的同步控制是通过计算机网络来控制爬行器的同步运行,保持被顶推构件的各点同步运行,以保持其滑移姿态。
操作人员可在中央控制室通过液压同步计算机控制系统人机界面进行液压滑移过程及相关数据的观察和控制指令的发布。
2.3滑移梁、滑移轨道
(1)滑移梁
滑移梁的作用是作为滑移轨道的找平和支撑措施,由本工程相关图纸信息可知原结构混凝土梁可作为滑移梁支撑,在对应砼柱上铺设埋件,高度与滑移梁标高齐平。
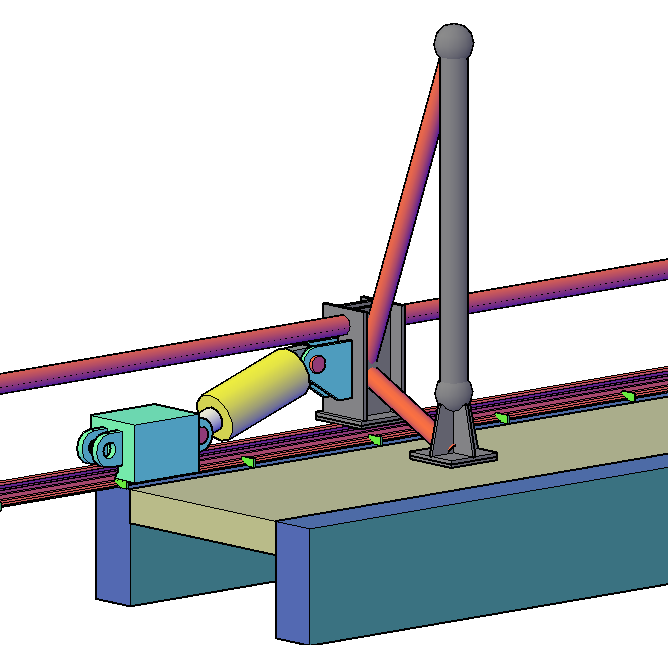
爬行器
滑移梁
支座
(2)滑移轨道的布设
采用液压顶推滑移网架,需设置专用的滑移轨道,待滑移结构(或滑靴)坐落于滑移轨道上,通过安装在构件上的滑移设备顶推滑移构件,沿轨道由初始拼装位置滑移至设计位置就位。滑移轨道的作用是承受网架结构滑移过程中的竖向荷载,并为爬行器提供反力点,在滑移方向上提供顺畅的通道。
(3)滑移轨道的技术要求
因轨道需与支撑柱(梁)及滑移梁固定,所以滑移轨道与滑移梁通过压板固定,滑移梁每隔800mm焊接一块轨道压板。轨道压板顶部与轨道上表面间距不小于90mm。轨道底部与滑移梁(框架梁)顶部间要求垫实、无缝隙。
2.4 滑靴设计
本工程中,采用原支座底部增加滑靴板的方式将网架荷载传递至滑移轨道。本工程中滑靴结构形式相同。滑靴底部设计限位挡板,用来限制滑移过程中网架沿轨道左右方向偏移。
滑移顶推点即液压爬行器与滑靴的连接节点,用于传递液压爬行器的水平顶推力,滑移顶推点设置在待滑移构件上。采用液压爬行器顶推构件滑移,需设置专用的顶推滑移点,顶推点的设计必须同时考虑滑移轨道的形式和网架的结构形式,使其能有效的传递水平摩擦力。
2.6临时杆件
由于滑靴之间间距较大,需在滑靴间增加临时杆件来有效的防止在滑移过程中网架杆件可能产生的变形。
3 技术措施
1、施工现场设安全工长进行现场安全措施的落实与管理,对现场施工人员、现场机械设备及现场用电进行统一管理。
2、作业前应对使用的工具、机具、设备进行检查,安全装置齐全有效。
3、操作面应有可靠的架台,护身,经检查无误,进行操作。
4、高空应铺设安装、操作临时平台,地面应划定安全区,应避免重物坠落,造成人员伤亡。
5、施工现场的机电设备、闸箱、电焊机,应有可靠的防雨措施。电器操作必须由专业人员进行,严禁非专业人员操作。
6、作业范围内设安全警戒线,非操作人员禁止入内。
4 结束语
1、应用BIM技术,给出了网架结构施工流程; 结合网架结构实际施工情况,从构件、胎架体系搭建、操作平台组装、网架滑移施工过程等方面,进行了完整详细的BIM模型建立,从三维空间角度实现了网架结构施工过程的模拟,起到了提高生产效率、保证生产质量、节约成本、缩短工期的作用。
2、整体吊装再滑移的施工安装方案, 减少了高空作业, 保证了网架的拼接和焊接质量, 效率高,安全可靠。
3、通过BIM技术在屋面网架施工技术的应用,可以在钢网架结构施工的各个阶段提供可视化模拟,方便指导施工,也为之后的施工提供数据依托,更加保障结构的安全。
参考文献
[1] 王增长.建筑给水排水工程[M].北京:中国建筑工业出版社,2005
[2] 张立秋.王宝贞.王琳,等.处理城市污水的生态糖设计[J].中国给水排水.2000.16(2):38-40

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



