南京师范大学 江苏省南京市 210000
摘要:本文简要介绍了双闭环直流调速系统的组成与基本工作原理,并对双闭环转速,直流调速系统设计展开分析论述,阐明了双闭环直流调速系统的模型仿真。
关键词:双闭环;直流调速系统;仿真
1.概述
双闭环直流调速系统设计和仿真分析
仿真时间8s。具体要求如下:
在一个由三相零式晶闸管整流装置供电的转速、电流双闭环调速系统中,已知电动机的额定数据为: kW , V , A , r/min , 电动势系数 =0.196 V·min/r , 主回路总电阻 =0.18Ω,变换器的放大倍数 =35。电磁时间常数 =0.012s,机电时间常数 =0.12s,电流反馈滤波时间常数 =0.0025s,转速反馈滤波时间常数 =0.015s。额定转速时的给定电压Un*N =10V,调节器ASR,ACR饱和输出电压Uim*=8V,Ucm =6.5V。
系统的静、动态指标为:稳态无静差,调速范围D=10,电流超调量 ≤5% ,空载起动到额定转速时的转速超调量 ≤10%。试求:
(1)确定电流反馈系数β(假设起动电流限制在1.1IN以内)和转速反馈系数α。
(2)试设计电流调节器ACR和转速调节器ASR。
(3)在matlab/simulink仿真平台下搭建系统仿真模型。计算电动机带40%额定负载起动到最低转速时的转速超调量σn。并与仿真结果进行对比分析。
(4)估算空载起动到额定转速的时间。说明系统的起动过程,并与仿真结果进行对比分析。
(5)在4s突加40%额定负载,给出转速、电流、转速调节器输出、转速调节器积分部分输出波形,并对系统的抗扰过程加以分析。
(6)若要求转速超调量 ≤3%,研究该系统的转速超调解决方法,并进行仿真验证。
2.双闭环直流调速系统的动态数学模型
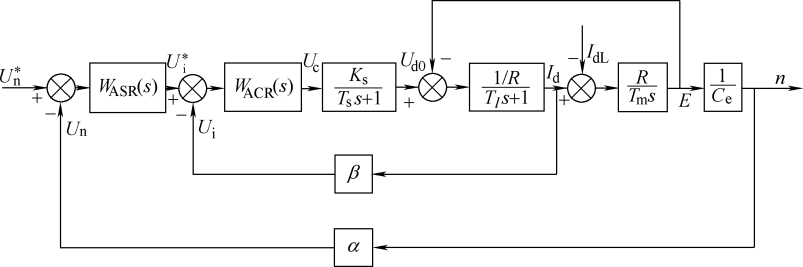
图1双闭环直流调速系统动态数学模型
动态数学模型如图1所示。对调速系统而言,被控制的对象是转速。随性能可以用阶跃给定下的动态响应描述。能否实现所期望的恒加速过程,最终以时间最优的形式达到所要求的性能指标,是设置双闭环控制的一个重要的追求目标。
(1)起动过程分析
电流Id从零增长到Idm,然后在一段时间内维持其值等于Idm不变,以后又下降并经调节后到达稳态值IdL。
转速波形先是缓慢升速,然后以恒加速上升,产生超调后,到达给定值n*。
起动过程分为电流上升、恒流升速和转速调节三个阶段,
转速调节器在此三个阶段中经历了不饱和、饱和以及退饱和三种情况。
(2)第Ⅰ阶段:电流上升阶段(0~t1)
电流从0到达最大允许值Idm
在t=0时,系统突加阶跃给定信号Un*,在ASR和ACR两个PI调节器的作用下, Id很快上升,在Id上升到Idl之前,电动机转矩小于负载转矩,转速为零。
当 Id ≥ IdL 后,电机开始起动,由于机电惯性作用,转速不会很快增长,ASR输入偏差电压仍较大, ASR很快进入饱和状态,而ACR一般不饱和。直到Id = Idm , Ui = U*im 。如图2所示。
(3)第Ⅱ阶段:恒流升速阶段(t1~t2)
Id基本保持在Idm,电动机加速到了给定值n*。ASR调节器始终保持在饱和状态,转速环仍相当于开环工作。系统表现为使用PI调节器的电流闭环控制,电流调节器的给定值就是ASR调节器的饱和值U*im,基本上保持电流Id = Idm不变,电流闭环调节的扰动是电动机的反电动势,它是一个线性渐增的斜坡扰动量,系统做不到无静差,而是Id略低于Idm。如图3所示。

图2双闭环直流调速电流波形
(4)第Ⅲ阶段:转速调节阶段(t2以后)
起始时刻是n上升到了给定值n*。n上升到了给定值n*,ΔUn=0。因为Id>Idm,电动机仍处于加速过程,使n超过了n* ,称之为起动过程的转速超调。转速的超调造成了ΔUn<0,ASR退出饱和状态,Ui和Id很快下降。转速仍在上升,直到t=t3时,Id= Idl ,转速才到达峰值。在t3~t4时间内, Id

图3 转速波形
参考文献:
[1] 阮毅,陈伯时. 电力拖动自动控制系统-运动控制系统 [M]. 4版. 北京:机械工业出版社,2012.
[2]张小青,杨小岗,樊战亭,冯自立,陈国栋.直流调速系统减少超调及加强抗扰的研究[J].电子测试,2016(24):57-59.
[3]陈玉庆.双闭环直流调速系统调节器优化设计与分析[J].电子技术,2018,47(11):55-60.
[4]郭昊坤.基于MATLAB的双闭环直流调速系统调节器的设计与仿真[J].自动化应用,2017(09):55-56.
作者简介:曹源(1999-08-09),男,汉族,籍贯:江苏丹阳,学历:本科生,研究方向:电气工程及其自动化。
通讯作者:曹弋,当前职称:副教授,研究方向:电气工程及其自动化。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



