深圳市伟创自动化设备有限公司 广东深圳 518000
摘要:自动翻转设备,包括顶升机构、翻转装置和输送装置,顶升机构上设置有用于放置工件的治具,顶升机构动作以使治具凸伸出顶升机构;翻转装置包括用于夹取工件的夹臂机构和用于承托工件的托臂机构,夹臂机构和托臂机构呈翻转的设置于翻转装置,夹臂机构夹
取工件,托臂机构置于工件的底部以承托工件,借由翻转装置动作以使工件翻转预设角度,输送装置上设置有呈伸缩设置的伸缩机构,夹臂机构与托臂机构配合以使翻转的所述工件置于伸缩机构上。翻转装置可以快速的翻转工件,且适用于各种尺寸的工件,结构简单。
关键词:自动 翻转设备
随着现代化工业飞速发展,越来越多的工厂为了提高生产效率,都在逐渐用机器代替人力,以减少人工成本。在电视生产加工过程中,需要对电视进行翻转而后打螺丝。在现有技术中,翻转设备在对无边框电视翻转时,由于镜面于背板的位移偏差较大,容易损坏玻璃镜面;而龙门架的翻转设备,设备占地空间大,对厂房的高度要求也高。因此,有必要提供一种结构简单,占地面积小且翻转效果好的自动翻转设备。
为实现上述目的,本设计提供了一种自动翻转设备,包括顶升机构、翻转装置和输送装置,顶升机构上设置有用于放置工件的治具,顶升机构动作以使治具凸伸出顶升机构;翻转装置包括用于夹取工件的夹臂机构和用于承托工件的托臂机构,夹臂机构和托臂机构呈翻转的设置于翻转装置,夹臂机构夹取工件,托臂机构置于工件的底部以承托工件,借由翻转装置动作以使工件翻转预设角度,输送装置上设置有呈伸缩设置的伸缩机构,夹臂机构与托臂机构配合以使翻转的所述工件置于伸缩机构上。(图1-12)



图1结构图1 图2结构图2 图3结构图3 图4顶升机构 图5翻转装置1
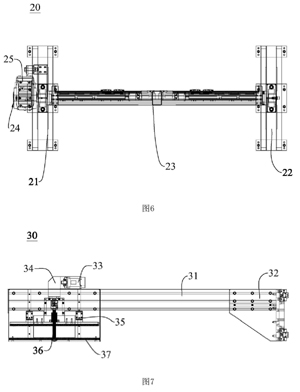



图6翻转装置2 图7、8夹臂机构 图9、10托臂机构 图11输送装置 图12伸缩机构
一、自动翻转设备十点创新优点
1、与现有技术相比,本设计提供的自动翻转设备,包括顶升机构、翻转装置和输送装置,翻转装置位于顶升机构和输送装置之间,工件位于顶升机构上通过翻转装置中的夹臂机构和托臂机构配合以使工件翻转预设角度,然后通过夹臂机构和托臂机构将工件置于输送装置上,由输送装置将工件传送至下一工序。通过翻转装置可以快速的翻转工件,结构简单,设计合理。
2、顶升机构包括第一顶升组件和第二顶升组件,第一顶升组件用于使治具凸伸出顶升机构,第二顶升组件用于支撑治具。第一顶升组件顶升治具,第二顶升组件支撑被顶升的治具,结构简单,设计合理。
3、第一顶升组件包括第一气缸和靠近第一气缸的底板,第一气缸动作以使第一气缸的输出端作用于底板,以使治具上升。通过第一气缸作用于底板的反作用力使得治具被顶升,工件放置于被顶升的治具上,使得夹臂机构能够更加快速方便的取料。
4、第二顶升组件位于治具的底部,第二顶升组件包括多个第二气缸,第二气缸动作以支撑治具。治具被顶升后通过第二顶升组件支撑,结构更加稳固。
5、翻转装置包括翻转基架,翻转基架包括第一固定架、第二固定架以及呈翻转设置于第一固定架和第二固定架之间的旋转梁,夹臂机构和托臂机构均安装于旋转梁,借由旋转梁动作以带动夹臂机构和托臂机构翻转预设角度。夹臂机构和托臂机构均连接于旋转梁,通过旋转梁旋转以带动夹臂机构和托臂机构翻转预设角度,结构简单,设计合理。
6、第一固定架上设置有第一电机和斜齿轮减速机,第一电机与斜齿轮减速机配合,以使旋转梁及安装于旋转梁上的夹臂机构和托臂机构翻转预设角度。通过伺服电机与斜齿轮减速机配合,使得旋转梁旋转,从而带动安装于旋转梁上的夹臂机构和托臂机构翻转预设角度,夹臂机构和托臂机构通过旋转梁从顶升机构上取料翻转并将翻转的工件放置于输送装置上。结构简单,效率高。
7、夹臂机构包括夹臂型材和用于夹取的夹取装置,夹取装置安装于夹臂型材上,夹取装置包括第一动力组件、第一滚珠丝杆、第一滑轨组件和夹取组件,第一动力组件安装于夹臂型材上,第一滚珠丝杆的一端连接于第一动力组件,第一滚珠丝杆的另一端穿置安装于夹取组件,第一滑轨组件安装于夹臂型材上,夹取组件呈活动设置于第一滑轨组件上;第一动力组件动作,以使夹取组件自动夹紧所述工件。通过第一动力组件动作,以使第一滚珠丝杆和第一滑轨组件动作,从而使得夹取组件沿第一滚珠丝杆和第一滑轨组件滑动,从而实现自动夹取工件。
8、托臂机构包括托臂型材和用于承托工件的托料装置;托料装置安装于托臂型材上,托料装置包括第二动力组件、第二滚珠丝杆、第二滑轨组件和托料组件,第二动力组件安装于托臂型材上,第二滚珠丝杆的一端连接于第二动力组件,第二滚珠丝杆的另一端穿置安装于托料组件,第二滑轨组件安装于托臂型材上,托料组件呈活动设置于第二滑轨组件上;第二动力组件动作,以使托料组件自动夹紧所述工件。托臂机构用于辅助夹臂机构夹紧工件,使得工件在翻转过程中更加稳固可靠;通过第二动力组件动作,以使第二滚珠丝杆和第二滑轨组件动作,从而使得托料组件沿第二滚珠丝杆和第二滑轨组件滑动,从而实现自动夹取工件。
9、输送装置包括用于放置工件的传送机构、伸缩机构和支架,伸缩机构设置于支架且位于传送机构内,借由伸缩机构动作以使传送机构凸伸出支架。由伸缩机构动作,以使传送机构凸伸出支架,从而方便翻转装置放料于传送机构上,结构简单,设计合理。
10、伸缩机构包括第三气缸、支撑座和导向杆,支撑座安装于传送机构的底部与导向杆连接,第三气缸的输出端安装于传送机构的底部,借由第三气缸动作以使传送机构凸伸出支架。第三气缸用于提供顶升动力,导向杆用于导向和辅助支撑,结构简单,设计合理。
二、自动翻转设备方案图说明:
1、自动翻转设备;10、顶升机构;11、治具;12、第一气缸;13、第二气缸;
2、翻转装置:21、第一固定架;22、第二固定架;23、旋转梁;24、第一电机;25、斜齿轮减速机;
3、夹臂机构:31、夹臂型材;32、夹臂固定座;33、第二电机;34、涡轮减速器;35、第一滑轨组件;36、第一滚珠丝杆;37、夹取组件;371、第一夹板;372、第一垫板;373、第二夹板;374、第二垫板。4、托臂机构:41、托臂型材;42、托臂固定座;43、加强筋;44、第三电机;45、行星齿轮减速器;46、第二滑轨组件;47、第二滚珠丝杆;48、托料组件;481、第三夹板;482、第三垫板;483、第四夹板;484、第四垫板;
5、输送装置:51、伸缩机构;511、传送治具;512、第三气缸;513、支撑座;514、导向杆;52、传送机构;521、传送电机;53、支架。
三、自动翻转设备工作方式
1、参阅图1至图3,自动翻转设备,包括顶升机构10、翻转装
置20和输送装置50,其中,顶升机构10上设置有用于放置工件的治具11,顶升机构10动作以使治具11凸伸出顶升机构10,以便于工件的夹取。翻转装置20包括用于夹取工件的夹臂机构30和用于承托工件的托臂机构40,夹臂机构30和托臂机构40呈翻转的设置于翻转装置20。
2、夹臂机构30夹取工件,托臂机构40置于工件的底部以承托工件,借由翻转装置20动作以使夹臂机构30、托臂机构40和位于夹臂机构30和托臂机构40上的工件翻转预设角度。在本实施例中,输送装置50上设置有呈伸缩设置的伸缩机构51,伸缩机构51凸伸出输送
装置50,可以方便夹臂机构30和托臂机构40放置工件,夹臂机构30与托臂机构40之间相互配合以使翻转的工件置于伸缩机构51上。
3、参阅图4,顶升机构10包括第一顶升组件和第二顶升组件,第一顶升组件用于使治具11凸伸出顶升机构10,从而可以方便夹臂机构30和托臂机构40夹取工件。在第一顶升组件顶升治具11之后,通过第二顶升组件支撑治具11。
4、参阅图5和图6,翻转装置20包括翻转基架,翻转基架包括第一固定架21、第二固定架22以及呈翻转设置于第一固定架21和第二固定架22之间的旋转梁23,夹臂机构30和托臂机构40均安装于旋转梁23,借由旋转梁23动作以带动夹臂机构30和托臂机构40翻转预设角度。夹臂机构30和托臂机构40均连接于旋转梁23,通过旋转梁23旋转以带动夹臂机构30和托臂机构40翻转预设角度,及将夹臂机构30和托臂机构40从顶升机构10上翻转至输送装置50上。
5、请参阅图5和图7,第一固定架21上设置有第一电机24和斜齿轮减速机25,第一电机24与斜齿轮减速机25配合,以使旋转梁23及安装于旋转梁23上的夹臂机构30和托臂机构40翻转预设角度。可以理解的,翻转装置20通过第一电机24与斜齿轮减速机25配合,使得旋转梁23可以在第一固定架21和第二固定架22之间旋转,从而带动安装于旋转梁23上的夹臂机构30和托臂机构40翻转预设角度,夹臂机构30和托臂机构40通过旋转梁23从顶升机构10上取料翻转并将翻转的工件放置于输送装置50上。另,在旋转梁23上还设置有用于安装夹臂机构30的线性滑轨,以及与线性滑轨配合的动力装置,使得夹臂机构30呈滑动的设置于旋转梁23上,根据工件的尺寸不同,可以滑动调节夹臂机构30之间的位置,使得自动翻转设备100适用于各种规格产品的翻转。
6、参阅图7和图8,夹臂机构30包括夹臂型材31和用于夹取的夹取装置,夹取装置安装于夹臂型材31上,夹臂型材31通过夹臂固定座32安装于旋转梁23上。夹取装置包括第一动力组件、第一滚珠丝杆36、第一滑轨组件35和夹取组件37。其中,第一动力组件包括第二电机33和涡轮减速器34;第二电机33安装于夹臂型材31上,涡轮减速器34与第一电机24联动,第一滚珠丝杆36的一端连接于涡轮减速器34,第一滚珠丝杆36的另一端穿置安装于夹取组件37,而第一滑轨组件35安装于夹臂型材31上,且夹取组件37呈活动设置于第一滑轨组件35上。具体的,第一动力组件动作,以使夹取组件37沿着第一滚珠丝杆36和第一滑轨组件35运动,从而自动夹紧所述工件。可以理解的,夹臂机构30通过第一动力组件动作,以使第一滚珠丝杆36和第一滑轨组件35动作,从而使得夹取组件37沿
第一滚珠丝杆36和第一滑轨组件35滑动,从而实现自动夹取工件。
6、参阅图9和图10,托臂机构40包括托臂型材41和用于承托工件的托料装置;托料装置安装于托臂型材41上,托臂型材41通过托臂固定座42安装于旋转梁23上,托臂型材41与旋转梁23之间还设置有加强筋43,以使结构更加稳固。
7、参阅图11和图12,输送装置50包括用于放置工件的传送机构52、伸缩机构51和支架53,传送机构52用于传送工件,包括传送电机521,传送电机521为传送机构52提供动力。伸缩机构51设置于支架53且位于传送机构52内,借由伸缩机构51动作以使传送机构52凸伸出支架53。由伸缩机构51动作,以使传送机构52凸伸出支架53,从而方便翻转装置20放料于传送机构52上。
四、结论
自动翻转装置可以快速的翻转工件,结构简单,设计合理。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



