山东科技大学
摘要:
疲劳驾驶作为影响道路交通安全的主要因素,对生命财产安全造成极大危害。本文研究的一种非接触式、实时性且精准度高的疲劳检测方法,通过光线在人脸不同区域的反射率不同的特点,使用双向投影积分进行眼部定位,依据瞳孔半径变化曲线,利用PERCLOS法检测驾驶员眼部开闭频率,确定是否处于疲劳驾驶状态。实验通过模拟测验证明该方法的准确性,能有效地应用于疲劳检测实践中。
关键词:图像处理;双向投影积分;PERCLOS;疲劳驾驶检测
0引言
据统计,疲劳驾驶是引发交通事故的首要因素,在交通事故死亡原因中占据首位,疲劳驾驶已逐渐成为社会关注的重点。通过图像处理技术对驾驶员的行车状态进行实时检测,对于交通安全性的提高和保证生命财产安全有着极其重要的意义。
1疲劳驾驶检测流程图
疲劳驾驶检测系统主要由人眼检测与定位、瞳孔半径测量以及疲劳认定组成,通过摄像头进行驾驶员图像采集,并进行图像光照补偿、去噪处理。如图1所示,通过对驾驶员眼部图像的处理,将生理状态直观化,最后用数据判断驾驶员是否处于疲劳驾驶状态。

图1疲劳驾驶检测流程图
2基于二值化图像的人眼定位
本文研究一种基于二值化图像的人眼定位方式,其定位分为四个步骤,如图2所示。

图2基于二值化图像的人眼定位流程图
2.1  的求解和图像二值化
的求解和图像二值化
用二维函数 表示图像[1],用入射到摄像头的光源能量之和与人脸发射的光的总量来表示函数 :入射量
表示图像[1],用入射到摄像头的光源能量之和与人脸发射的光的总量来表示函数 :入射量 ,反射量 。
,反射量 。
其中:
 (1)
(1)
 (2)
(2)
式(2)中指出,反射量趋于0(全吸收)和1(全反射),是图像内在性质的决定者。根据 的值体现面部特征,通过与门限值进行比较,将眼部这个反射量小的部位从图像中分割出来。
在空间中,反射量在不同物体交界处急剧变化,但入射量变化慢。本文对图像进行低通滤波器处理,得到 :
 (3)
(3)
通过式(1)(3)解得 。
图3为积分投影后的二值化图像,图中可以清晰地分辨出人眼位置。

图3 图像二值化结果
2.2双向积分投影实现精确定位
经过二值化图像处理后,图像中噪声量得到大幅度减少,降低了人眼定位的难度。对图3中左右区域各自进行双向投影积分,投影积分如图4所示。
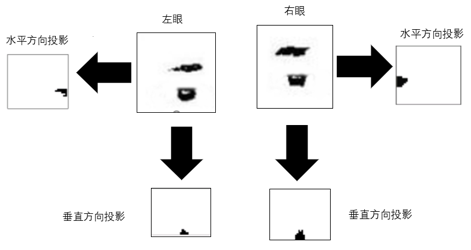
图4左眼、右眼在水平和垂直方向上的积分投影
瞳孔的中心位置 为投影积分在水平方向和垂直方向上最大值的交集。
为投影积分在水平方向和垂直方向上最大值的交集。

图5是对二值化后的人眼投影曲线归一化。从图中可以看出,两侧出现灰度值最大的两个点,分别对应双眼的中心坐标。

图5双眼定位结果
3基于瞳孔半径曲线的眼睑开闭频率统计
从图5可以看出,双眼中心两侧的灰度值曲线发生急剧变化,这是由于瞳孔以外的浅色区域的灰度值变化引起的。在瞳孔中心两侧的积分宽度 处,可以确定是瞳孔边界[2],记瞳孔半径最大值为
处,可以确定是瞳孔边界[2],记瞳孔半径最大值为 。
。
据统计,成年人每分钟眨眼12~30次,每次用时约0.1~0.3s。当出现疲劳后,人的眨眼频率将会变快且每次用时变短,因此可以根据人的瞳孔半径变化曲线对眼睑开闭频率进行统计。实验得到瞳孔半径变化曲线如图6所示[3]。

图6瞳孔半径变化曲线
在首帧图像中得到瞳孔半径最大值,其余帧图像中用 与
与 进行比较
进行比较 ,得到瞳孔相对大小
,得到瞳孔相对大小 。本次实验中将
。本次实验中将 作为眼睑闭合的状态。
作为眼睑闭合的状态。
4 PERCLOS原理
PERCLOS定义为单位时间中眼睑张开与闭合的时间比,能直观反映疲劳状态。PERCLOS方法有EM、P70、P80三种不同的标准[4],分别指瞳孔被眼睑覆盖面积超过50%、70%、80%时,认定眼睛为闭合状态。
本文以该方法的P80标准作为依据,计算连续图像中司机眼部PERCLOS特征值,判断司机的疲劳状态。其原理如图7所示。

图7 PERCLOS算法原理
PERCLOS算法对人眼闭合频率的定义为

记 为眼睑闭合80%以上的时间,
为眼睑闭合80%以上的时间, 为眼睑闭合20%以上的时间。f表示眼睑闭合的时间比,为简化计算,将时间比转化为图像帧数比。
为眼睑闭合20%以上的时间。f表示眼睑闭合的时间比,为简化计算,将时间比转化为图像帧数比。

其中, 是眼睑张开帧数,
是眼睑张开帧数, 是眼睑闭合帧数。
是眼睑闭合帧数。
5试验结果及分析
在实验室模拟驾驶室的实际情况,以及特殊光照进行试验。通过采集50位测试者在不同环境中的视频集进行分析,每位测试者均取20张图像进行实验。测试者人眼定位结果如图8所示,定位准确率如表2所示。


图8人眼定位效果图
表2人眼定位准确率
| 测试量 | 准确率 |
| 2765 | 96.2% |
| 2805 | 97.7% |
此次实验经过多次多样本检测处理,结合测试样本的实际状态作为对照,本文以PERCLOS = 0.4作为判断驾驶员疲劳的阈值.疲劳检测结果如表3所示。实验结果表明,该阈值的准确度较高。
表3疲劳试验结果统计
| 疲劳次数 | 检测数量 | 准确率/% |
| 73 | 70 | 95.89% |
| 92 | 89 | 96.73% |
6结束语
本文使用图像处理的方法进行疲劳检测,基于二值化图像的双向积分投影进行眼部区域定位,根据瞳孔半径在连续图像下的变化,统计眼睑闭合与张开比,得到PERCLOS的特征值,结合阈值对样本疲劳状态进行判定。
实验数据表明,本文使用的方法检测速率和准确度较高,并且对不同情境下不同样本的眼睛状态识别准确率较高。
参考文献
[1]冈萨雷斯.数字图像处理[M].第二版.阮秋琦,阮智宇.北京:电子工业出版社,2007:39-40.
[2]冯建强,刘文波,于盛林.基于灰度积分投影的人眼定位计算仿真[M].2005
[3]姚胜,李晓华,张卫华,等.基于LBP的眼睛开闭检测方法[J].计算机应用研究,2015,32(6):1897-1901.
[4]ZEILE M D, FERGUSR. Stochastic pooling for regularization of deep convolutional neural networks[J].Computer Science,2012,7575(1):702-715.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



